Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Регулирование скорости ДПТ изменением якорного сопротивления и тока возбуждения.
|
|
 1.Изменение скорости изменением
1.Изменение скорости изменением  якорной цепи:
якорной цепи:
Вводя ступенчато сопротивление пускового или регулировочного реостата можно получить любую скорость от  до 0. при этом мощность на валу двигателя
до 0. при этом мощность на валу двигателя  равна: момент на угловую скорость
равна: момент на угловую скорость  Изменяется пропорционально скорости, а потребляемая мощность соответственно
Изменяется пропорционально скорости, а потребляемая мощность соответственно 

Этот способ несмотря на свою простоту и надёжность имеет недостатки.
1.Велики потери энергии на нагрев.
 где
где  =>
=> 
2.При скоростях  двигатели самовентиляции начинают греться, следовательно, их нельзя нагружать до номинального момента.
двигатели самовентиляции начинают греться, следовательно, их нельзя нагружать до номинального момента.
Данный метод применяется при расчётах транспортных и грузоподъёмных механизмов.
Достоинства:
1.Привод простой
2.плоскость регулирования хорошая
Недостатки:
1.Большие потери
2.Скорость выше основной недостижима
3.Жёсткость характеристик плохая.
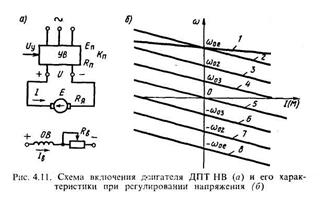
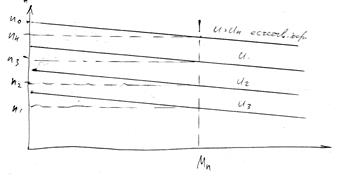
Регулирование скорости изменением подводимого напряжения:
Этот метод применяется для ДПТ с независим возбуждением, а для питания якорной обмотки требуется дополнительный регулируемый источник питания.
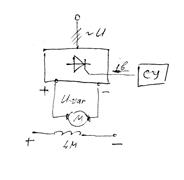
U-var -варь-
ируемое т.е. изменяя-
емое.
 В качестве источника регулируемого напряжения используют управляемые полупроводниковые выпрямители, магнитные усилители, импульсные регуляторы.
В качестве источника регулируемого напряжения используют управляемые полупроводниковые выпрямители, магнитные усилители, импульсные регуляторы.
УВ – управляемый выпрямитель.
Достоинства:
1.Потери энергии минимальны.
2.Диапазон хороший (более 100)
3.Плавность характеристик хорошая
4.Жёсткость характеристик хорошая
Недостатки:
1.Схема сложная, а значит дорогая
2.При нормальной работе двигателя, скорость выше основной не достижима
Обмотка возбуждения ДПТ питается от отдельного источника постоянного тока, например, неуправляемого или также управляемого выпрямителя
|
|