Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Скоростная характеристика ДПТ параллельного возбуждения для двигательного режима.
|
|
Естественные скоростная характеристика.
Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют его рабочие свойства.
Скоростная характеристика двигателя определяются равенством (6) при U = const. При отсутствии дополнительного сопротивления в цепи якоря эта характеристика называются естественной.
 (6)
(6)
Если щетки находятся на геометрической нейтрали, при увеличении Ia поток Фδ несколько уменьшится вследствие действия поперечной реакции якоря. В результате этого скорость n, согласно выражению (6), будет стремиться возрасти. С другой стороны, падение напряжения RaIa вызывает уменьшение скорости. Таким образом, возможны три вида скоростной характеристики, изображенные на рис 8;
1 — при преобладании влияния RaIa;
2 — при взаимной компенсации влияния RaIa и уменьшения;
3 — при преобладании влияния уменьшения Фδ.
Двигатели параллельного возбуждения изготовляются со слегка падающими характеристиками вида 1 (рис. 8). В современных высоко использованных машинах ввиду довольно сильного насыщения зубцов, якоря влияние поперечной реакции якоря может быть настолько большим, что получить характеристику вида 1 (рис. 8) невозможно. Тогда для получения такой характеристики на полюсах помещают слабую последовательную обмотку возбуждения согласного включения, н. с. которой составляет до 10% от н. с. параллельной обмотки возбуждения. При этом уменьшение Фδ под воздействием поперечной реакции якоря частично или полностью компенсируется. Такую последовательную обмотку возбуждения называют стабилизирующей, а двигатель с такой обмоткой по-прежнему называется двигателем -параллельного возбуждения.
Изменение скорости вращения Δ n (рис. 8) при переходе от 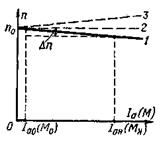 холостого хода (Ia =Ia0) к номинальной нагрузке (Ia=Iaн) у двигателя параллельного возбуждения при работе на естественной характеристике мало и составляет 2—8% от nн. Такие слабо падающие характеристики называются жесткими. Двигатели параллельного возбуждения с жесткими характеристиками применяются в установках, в которых требуется, чтобы скорость вращения при изменении нагрузки сохранялась приблизительно постоянной (металлорежущие станки и пр.).
холостого хода (Ia =Ia0) к номинальной нагрузке (Ia=Iaн) у двигателя параллельного возбуждения при работе на естественной характеристике мало и составляет 2—8% от nн. Такие слабо падающие характеристики называются жесткими. Двигатели параллельного возбуждения с жесткими характеристиками применяются в установках, в которых требуется, чтобы скорость вращения при изменении нагрузки сохранялась приблизительно постоянной (металлорежущие станки и пр.).
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
Рис. 8. Виды естественных скоростных и механических характеристик двигателя параллельного возбуждения
Регулирование скорости посредствам ослабленного магнитного потока производится обычно с помощью реостата в цепи возбуждения Rp в (см. рис. 11). При отсутствии добавочного сопротивления в цепи якоря (Rpa= 0) и U = const характеристики n =f(Ia) и n=f(M), определяемые равенством (6), для разных значений Rр.в., IB или Фδ имеют вид, показанный на рис. 9. Все характеристики n =f(Ia) сходятся на оси абсцисс (n = 0) в общей точке при весьма большом токе Ia, который равен

Однако механические характеристики пересекают ось абсцисс в разных точках.
Нижняя характеристика на рис. 9 соответствует номинальному потоку. Значения n при установившемся режиме работы соответствуют точкам пересечения рассматриваемых характеристик с кривой Мст=f(п) для рабочей машины, соединенной с двигателем (штриховая линия на рис. 9).
Точка холостого хода двигателя (М = М0, Ia = Ia0) лежит несколько правее оси ординат на рис. 9. С увеличением скорости вращения n вследствие увеличения механических потерь М0 и I00 также увеличиваются. Если в этом режиме с помощью приложенного извне момента вращения начать увеличивать скорость вращения n, то Еа=cMФδ n будет увеличиваться, а Iа и М будут, согласно равенствам
 и
и 
уменьшаться. При Iа = 0 и М. =0 механические и магнитные потери двигателя покрываются за счет подводимой к валу механической мощности, а при дальнейшем увеличении скорости Iа и М изменят знак и двигатель перейдет в генераторный режим работы (участки характеристик на рис. 9 левее оси ординат).
Двигатели общего применения допускают по условиям коммутации регулирование скорости ослаблением поля в пределах 1: 2. Изготовляются также двигатели с регулированием скорости таким способом в пределах до 1: 5 или даже 1: 8, но в этом случае для ограничения максимального напряжения между коллекторными пластинами необходимо увеличить воздушный зазор, регулировать поток по отдельным группам полюсов или применить компенсационную обмотку. Стоимость двигателя при этом увеличивается.
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе

Рис. 9. Механические и скоростные характеристики двигателя параллельного возбуждения при разных потоках возбуждения
Регулирование скорости сопротивлением в цепи якоря, искусственные механическая и скоростная характеристики. Если последовательно в цепь якоря включить добавочное сопротивление Rpa (рис. 10, а), то вместо выражения (6) получим
 (8)
(8)
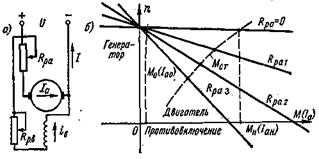
Сопротивление Rpa может быть регулируемым и должно быть рассчитано на длительную работу. Цепь возбуждения должна быть включена на напряжение сети.
Рис. 10. Схема регулирования скорости вращения двигателя параллельного возбуждения с помощью сопротивления в цепи якоря (а) и соответствующие механические и скоростные характеристики (б)
Характеристики n=f(M) и n=f(Ia) для различных значений Rpa = const при U = const изображены на рис. 10, б (Rpa1 < Rpa2< Rpa3)- Верхняя характеристика (Rpa = 0) является естественной. Каждая из характеристик пересекает ось абсцисс (n= 0) в точке с
 и
и 
Продолжения этих характеристик под осью абсцисс на рис. 10 соответствуют торможению двигателя противовключением. В этом случае n< 0, э.д.с. Еа имеет противоположный знак и складывается с напряжением сети U, вследствие чего

а момент двигателя М действует против направления вращения и является поэтому тормозящим.
Если в режиме холостого хода (Ia = Ia0) с помощью приложенного извне момента вращения начать увеличивать скорость вращения, то сначала достигается режим Ia=0, а затем Ia изменит направление и машина перейдет в режим генератора (участки характеристик на рис. 10, б слева от оси ординат).
Как видно из рис. 10, б, при включении Rpa характеристики становятся менее жесткими, а при больших величинах Rpa — круто падающими, или мягкими.
Если кривая момента сопротивления Mст=f(n) имеет вид, изображенный на рис. 10, б штриховой линией, то значения n при установившемся режиме работы для каждого значения Rра определяются точками пересечения соответствующих кривых. Чем больше Rpa, тем меньше n и ниже к. п. д.
Рабочие характеристики представляют собой зависимости потребляемой мощности Р1 потребляемого тока I, скорости n, момента М и к. п. д. η от полезной мощности Р2, при U = const и неизменных положениях регулирующих реостатов. Рабочие характеристики двигателя параллельного возбуждения малой  мощности при отсутствии добавочного сопротивления в цепи якоря представлены на рис. 11.
мощности при отсутствии добавочного сопротивления в цепи якоря представлены на рис. 11.
Одновременно с увеличением мощности на валу Р2 растет и момент на валу М. Поскольку с увеличением Р2 и М скорость n несколько уменьшается, то М = Р2/п растет несколько быстрее Р2. Увеличение Р2 и М, естественно, сопровождается увеличением тока двигателя I. Пропорционально I растет также потребляемая из сети мощность Р1. При холостом ходе (Р2 = 0) к. п. д. η = 0, затем с увеличением Р2 сначала η | быстро растет, но при больших нагрузках в связи с большим ростом потерь в цепи якоря η снова начинает уменьшаться.
Рис. 11. Рабочие характеристики
двигателя параллельного возбуждения
РН = 10 квт, UН = 220 в, пН = 950 об/мин
|
|