Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Ручное переключение выходов см. Главу H
|
|
Конфигурация DO – выходов см. Главу H
· При необходимости вставить строку см. I27
· Нажать F1*[INST]; выбрать I/O; выбратькоманду, например, DO[ ]=......
· Курсором переместиться в скобки за DO [ ], ввести номер, нажать Enter
· За знаком “=” выбрать ON, OFF или PULSE (WIDTH), R[ ].
* Или нажать NEXT
 |
 Вставка RI (Входы робота)
Вставка RI (Входы робота)
Входы/выходы робота могут контролироваться пользователем. Эти сигналы имеются в наличии на разъеме EE.
Конфигурация RI см. Главу H
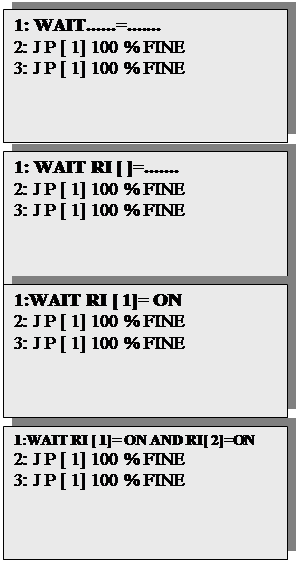
Пример программы:
Выполнение программы должно быть приостановлено до тех пор, пока вход робота (1) не будет находиться в состоянии ON.
1. Если необходимо, вставте строку.
2. Нажать F1*[INST]; выбрать WAIT; выбрать WAIT....=....
3. Выбрать RI[ ]; ввести номер входа и нажать Enter
4. Выбрать ON
5. Установить курсор за ON и нажать F4 [CHOICE]
6. Выбрать AND
7. Выбрать RI[ ]; ввести номер входа и нажать Enter
8. Выбрать =
9. Выбрать ON
* Или нажать NEXT
Вставка DI (Цифровые входы)
Цифровые входы/выходы могут использоваться пользователем для управления процессом.
Моделирование DI – входов см. Главу H
|
|