Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Активация настроенного инструмента
|
|
 F5 [SETIND]; задать номер Инструмента; Enter
F5 [SETIND]; задать номер Инструмента; Enter
Теперь инструмент активен!
 Инструмент можно активировать в любой момент также и с помощью меню JOG
Инструмент можно активировать в любой момент также и с помощью меню JOG
 SHIFT и COORD нажать одновременно, перейти на TOOL, задать номер.
SHIFT и COORD нажать одновременно, перейти на TOOL, задать номер.

 Чтобы закрыть окно, следует одновременно нажать SHIFT и COORD.
Чтобы закрыть окно, следует одновременно нажать SHIFT и COORD.
Примечания
Содержание главы F
Общая информация Страница 2
Настройка USER_FRAME (трехточечный метод) Страница 3
 Система координат пользователя (User_Frame)
Система координат пользователя (User_Frame)
 |

|




 Данные позиционирования описывают положение и ориентацию системы инструмента по отношению к системе координат пользователя.
Данные позиционирования описывают положение и ориентацию системы инструмента по отношению к системе координат пользователя.


|
Если система координат пользователя не задана, то система пользователя совпадает с базовой системой координат.

Настройка USER_FRAME
 Пример:
Пример:
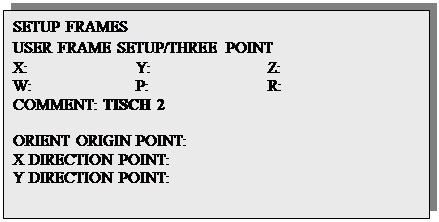
задание USER_FRAME трехточечным методом
1.  MENUS; SETUP; F1; FRAMES
MENUS; SETUP; F1; FRAMES
2. F3 [OTHER]; выбрать USER FRAME
3.  Установить курсор, например, на USER 1
Установить курсор, например, на USER 1
4. F2 [DETAIL].
5.  F2 [METHODE]; выбрать THREE POINT.
F2 [METHODE]; выбрать THREE POINT.
6. Курсор находится на COMMENT
7. Нажать Enter, ввести текст (см. E3), Enter
 |
Продолжение на следующей странице.
Продолжение
Настройка USER_FRAME
Пример:
задание USER_FRAME трехточечным методом
8. Курсор на ORIENT ORIGIN POINT
9.  Переместить рабочий орган робота в ORIENT ORIGIN POINT
Переместить рабочий орган робота в ORIENT ORIGIN POINT
10.  SHIFT и F5 [RECORD] нажать одновременно.
SHIFT и F5 [RECORD] нажать одновременно.
11.  Курсор на X DIRECTION POINT
Курсор на X DIRECTION POINT
12. Переместить робот в X DIRECTION POINT
13. SHIFT и F5 [RECORD] нажать одновременно.
14.  Переместить робот в Y DIRECTION POINT
Переместить робот в Y DIRECTION POINT
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
15.  SHIFT и F5 [RECORD] нажать одновременно.
SHIFT и F5 [RECORD] нажать одновременно.
16. Нажать PREV.
 |
Продолжение на следующей странице
Продолжение
Настройка USER_FRAME
 Пример:
Пример:
задание USER_FRAME трехточечным методом
|
|