Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

На главном выключателе может оставаться напряжение.
|
|
Настройка Hot start
1. Нажать MENUS; выбрать 0[NEXT]; выбрать 6.SYSTEM; нажать F1[TYPE]
2. Выбрать CONFIG
3. Нажать F4[TRUE] для настройки Hot start на TRUE
 |
Выполнение Cold start (холодного старта) при активном Hot start
Управление отключено.
 |
1. PREV и NEXT удерживать нажатыми.
2. Включить управление.
3. Подождать, пока запустится управление.
4.  Отпустить PREV и NEXT
Отпустить PREV и NEXT
5. Задать 2
6. Нажать Enter.
Или
SHIFT + RESET удерживать при включении до появления сообщения
-- COLD START MODE SELECTED --
После этого обе клавиши можно отпустить.
Примечание: При этом не отображается содержимое экрана, приведенное справа.
Примечания
Содержание главы C
Отдельные оси Страница 2
Управление Страница 3
Примечания Страница 4
 |
Примечание: Ограничение осей см. Axis Limits
Управление
 |
1. Включить панель управления.
2. Переключатель режимов эксплуатации установить в положение Т1.
3. Включить пульт обучения (1).
4. С помощью кнопки COORD (2) выбрать JOINT (перемещение отдельных осей)
Светодиод Joint (Светодиоды см. Главу P) должен светиться, а указатель на дисплее справа вверху указывает режим Joint. Удерживать нажатым переключатель аварийной автоблокировки.
5. Нажать SHIFT + RESET (3) и подождать, пока не погаснет светодиод Fault.
6. С помощью клавиш управления скоростью (4) выбрать скорость < =10%.
Допустимые значения скорости:
*Vfine, **Fine, 1%, 2%, 3%, 4%, 5%, 10% -100%
Примечание: При задании скорости VFINE и FINE необходимо повторно
нажимать клавишу перемещения.
7. Удерживать нажатой клавишу SHIFT (5) и нажать на одну из клавиш перемещения J1 - J6.
* = приблизит. 0, 0001°
** = приблизит. 0, 001°
Примечания
Содержание главы D
Базовая система координат (WORLD) Страница 2
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
Управление Страница 3
Примечания Страница 4


 1. Базовая система координат (World_frame)
1. Базовая система координат (World_frame)
Базовая система координат является стандартной
системой координат, которую нельзя изменить.
Положение системы координат жестко задано по отношению
к базовой монтажной плоскости робота.
 |
Управление
 |
1. Включить панель управления
2. Переключатель режимов эксплуатации установить в положение T1.
3. Включить пульт обучения (1).
4. С помощью клавиши COORD (2) выбрать ***WORLD. Светодиод XYZ должен светиться, а на дисплее справа вверху изображается WORLD.
5. Удерживать нажатым переключатель аварийной автоблокировки.
6. Нажать SHIFT + RESET (3) и подождать, пока не погаснет светодиод Fault.
7. С помощью клавиш управления скоростью (4) выбрать скорость < =10%.
Допустимые значения скорости:
*Vfine, **Fine, 1%, 2%, 3%, 4%, 5%, 10%-100%
Примечание: При выборе VFINE и FINE для перемещения повторно нажать клавиши перемещения.
8. Удерживать нажатой клавишу SHIFT (5) и нажать на одну из клавиш перемещения.
* = приблизит. 0, 002 мм
** = приблизит. 0, 023 м
*** = Если WORLD не будет выведен на индикацию, установите переменную $SCR_GRP.$COORD_MASK на 31
Примечания
Содержание главы E
Общая информация Страница 2
Настройка трехточечным методом Страница 3
Настройка прямым заданием Страница 6
Настройка шеститочечным методом Страница 9
Система координат инструмента (Tool_Frame)

|

|


|
 Начало системы координат инструмента является рабочей точкой инструмента (TCP, Tool-Center-Point)
Начало системы координат инструмента является рабочей точкой инструмента (TCP, Tool-Center-Point)
 Ориентация системы координат инструмента соответствует ориентации инструмента.
Ориентация системы координат инструмента соответствует ориентации инструмента.

 Применительно к манипуляторам рабочая точка инструмента соответствует середине захвата прикрепленных схватов манипулятора.
Применительно к манипуляторам рабочая точка инструмента соответствует середине захвата прикрепленных схватов манипулятора.



|
|
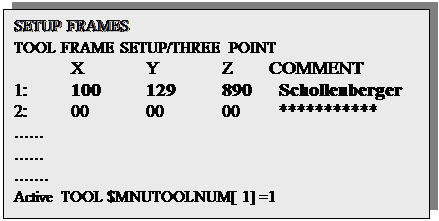
Настройка TOOL_FRAME
 Пример:
Пример:
задание TOOL_FRAME трехточечным методом
1.  MENUS; SETUP; F1; FRAMES
MENUS; SETUP; F1; FRAMES
2. F3 [OTHER]; выбрать TOOL FRAME
3. Установить курсор, например, на Инструмент 1
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
4. F2 [DETAIL].
5. F2 [METHODE]; выбрать THREE POINT.
6. курсор находится на COMMENT
7. нажать Enter, выбрать способ задания и ввести текст, Enter
 |
Продолжение на следующей странице.
Продолжение
Настройка TOOL_FRAME
Пример:
задание TOOL_FRAME трехточечным методом
8.  Курсор на APPROACH POINT 1
Курсор на APPROACH POINT 1
9. Переместить центр инструмента в точку отсчета.
10. SHIFT и F5 [RECORD] нажать одновременно.
11. Курсор на APPROACH POINT 2
12. Переместить рабочий орган робота от точки отсчета
13. Шестую ось повернуть > 90° < 360°
14. Переместить центр инструмента в точку отсчета.
15. SHIFT и F5 [RECORD] нажать одновременно.
16. Курсор на APPROACH POINT 3
17. Переместить рабочий орган робота от точки отсчета
18. Переориентировать руку робота около оси X и Y
19. Переместить центр инструмента в точку отсчета.
20. SHIFT и F5 [RECORD] нажать одновременно.
21. Нажать PREV.
 | |||||
 |  | ||||
Продолжение на следующей странице
 | |  |
Продолжение
Настройка TOOL_FRAME
 Пример:
Пример:
задание TOOL_FRAME трехточечным методом
|
|