Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Модель Асинхронного двигателя во вращающейся системе координат в MATLAB
|
|
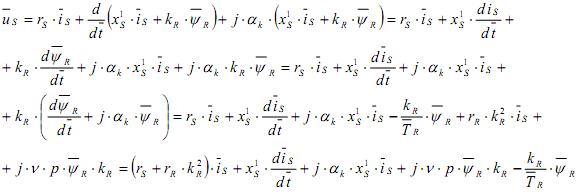
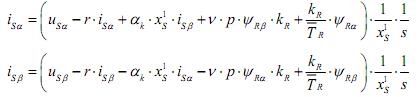
При выполнении курсовой работы, связанных с моделированием асинхронного двигателя, возникает необходимость увеличения вариантов их модификаций. Одним из способов решения этой задачи является возможность выразить электромагнитный момент через различную комбинацию переменных токов и потокосцеплений двигателя [1, c.238] и [2]. Основные уравнения математической модели АД, записаны в векторной форме в относительных единицах, имеют следующий вид [3]:
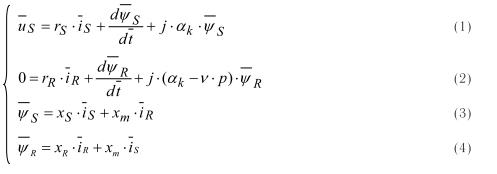
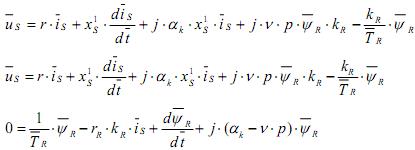
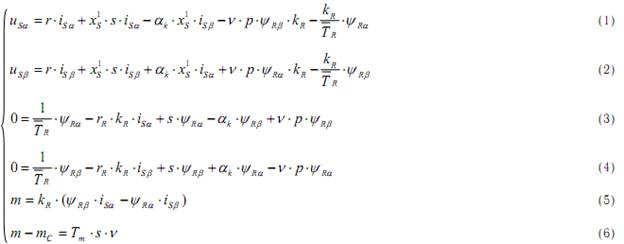
рассмотрим асинхронный двигатель с коротко замкнутым ротором  , кроме того, определим электромагнитный момент по следующей формуле [1, с.238]
, кроме того, определим электромагнитный момент по следующей формуле [1, с.238]
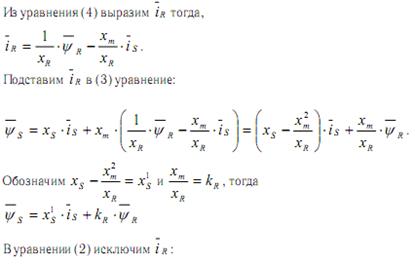
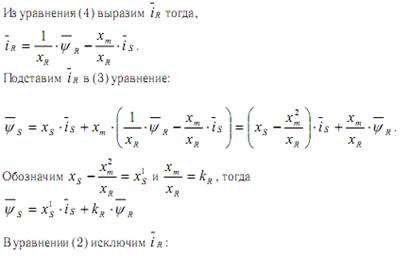
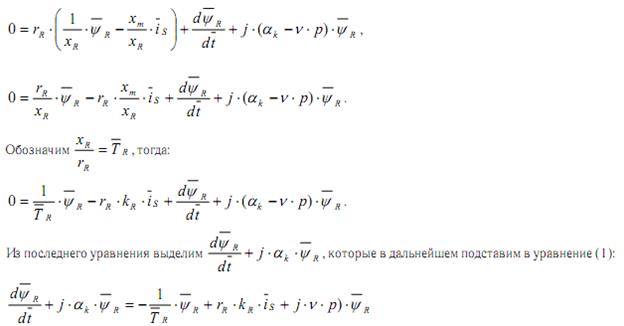
В уравнений (1) сделаем следующие преобразования:
Обозначим rS+rR+kr2=r тогда:
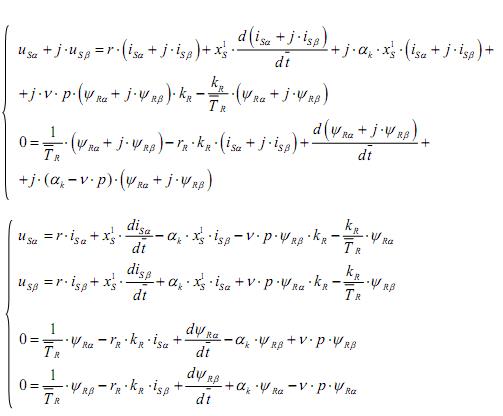
Вещественную ось обозначим α, а мнимую через δ. Пространственные векторы в этом случае раскладываются по осям:

Подставим эти значения в уравнения и, приравняв отдельно вещественные и мнимые части, получим:
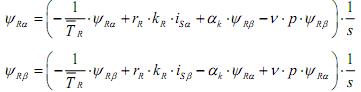
С учетом электромагнитных моментов система уравнений в операторной форме  примет вид:
примет вид:
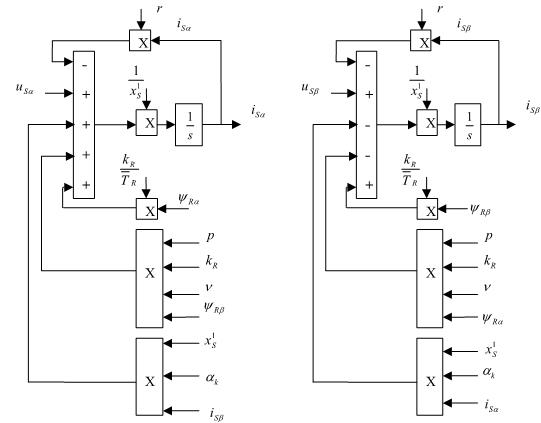
Структурная схема для уравнений (1) и (2):
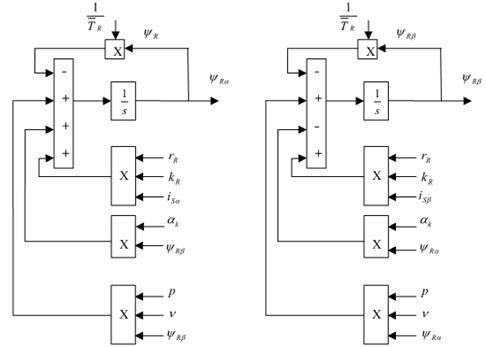
Структурная схема для уравнений (3) и (4):

рассмотрим трехфазный асинхронный короткозамкнутый двигатель со следующими номинальными данными и пар
метрами схемы замещения [4].
Номинальные данные:
номинальная мощность............................................... P = 38 кВт
номинальное фазное напряжение...................................... U1 = 220 B
номинальный фазный ток............................................. I1 = 192 A
номинальная частота................................................. f = 50 Гц
номинальная синхронная скорость.....................................𝛺 0N =104.7 рад/с
номинальная скорость ротора......................................... 𝛺 N =38.223рад/с
номинальный КПД...................................................nN = 0.95
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
номинальный коэффициент мощности............................ cos  N = 0.92
N = 0.92
число пар полюсов.............................................p = 2
Параметры Т-образной схемы замещения при номинальной частоте
Активное сопротивление обмотки статора........................ RS = 0.083 Ом
индуктивное сопротивление рассеянья обмотки статора.............Lsδ = 0.008Ом
активное сопротивление обмотки ротора, приведенное к статору.......Rr = 0.041 Ом
индуктивное сопротивление рассеянья обмотки ротора,..............Lrб = 0.0012 Ом
главное индуктивное сопротивление..............................Xm =0.0318 Ом
Суммарный момент инерции двигателя и механизма.................J = 0.45 кг∙ м2
Базисные величины системы относительных единиц.
Напряжение, В..................... 
|
Ток, А..................................... 
|
Частота а, рад /с........................ 
|
Скорость ротора, рад /с........... 
|
Сопротивление, О м................ 
|
Потокосцепление, В *с.............. 
|
Индуктивность, Гн................. 
В качестве базисного значения моментов двигателя и статического механизма выбираем значение электромагнитого момента двигателя в номинальном режиме:

где 1.0084 kD =1.0084 – коэффициент, учитывающий различие значений электромагнитного момента и момента на валу двигателя в номинальном режиме.
В качестве базисной мощности выбираем значение электромагнитной мощности двигателя в номинальном режиме, определяемое по следующей формуле:  Вт
Вт
Относительные значения параметров схемы замещения двигателя.


Механическая постоянная времени системы «двигатель-механизм» составляет:

Модель АКЗ, построенная по уравнениям (1) – (6), представлена на рис. 37-41. На вход модели в момент времени t=0 подаются напряжения  , тем самым реализуя прямой пуск.
, тем самым реализуя прямой пуск.
Осциллоскопы измеряют относительные значения электромагнитного момента и скорости. результаты моделирования представлены на рис. 2. Они показывают, что при прямом пуске вначале наблюдается значительные колебания момента. Такие же колебания наблюдаются в токе и скорости.
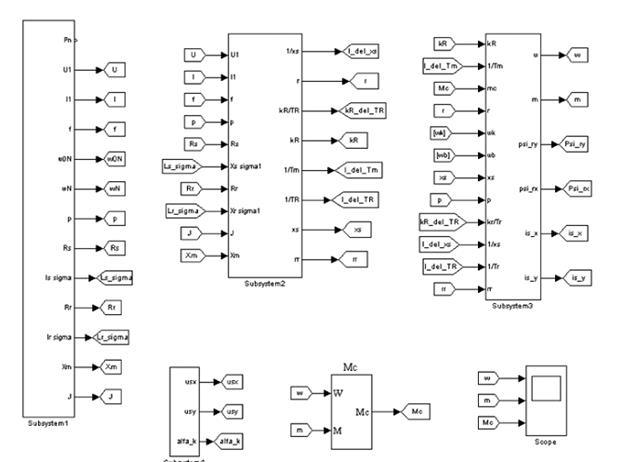
Рис. 66. Полная модель АКЗ во вращающейся системе координат с переменными 
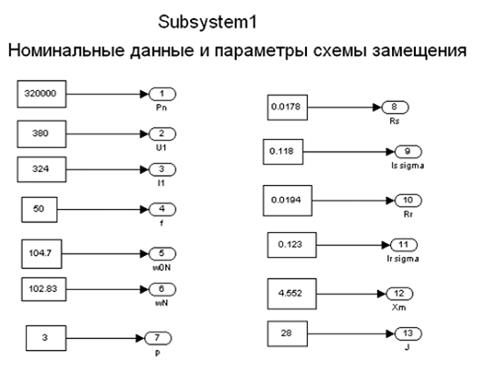
Рис. 67.Номинальные данные и параметры схемы замещения

Рис. 68.Расчет параметров модели АД в системе относительных едениц
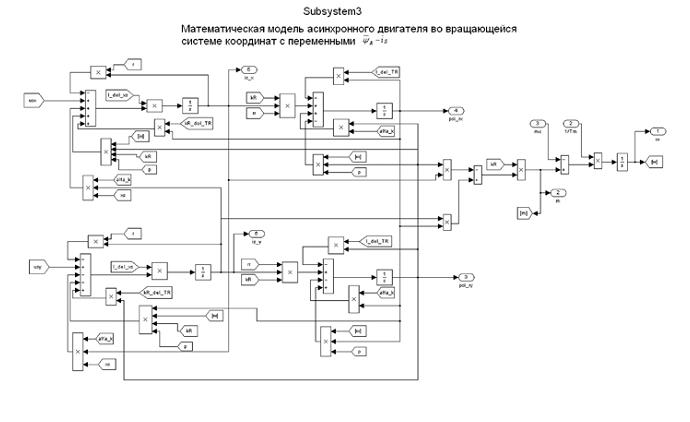
Рис. 69.Математическая модель АД во вращающейся системе координат

Рис. 70.Преобразователь координат
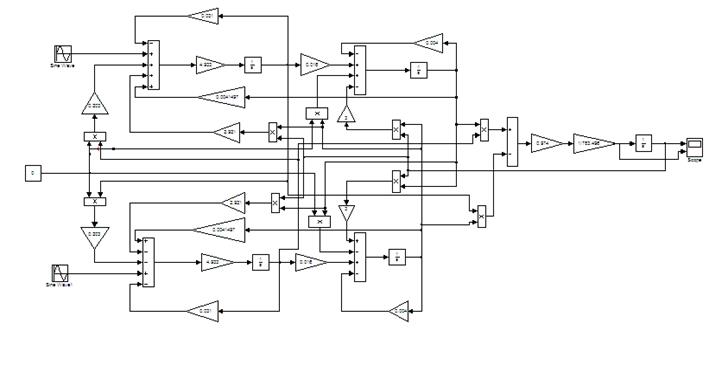
Рис. 71. Математическая модель АД во вращающейся системе координат без SubSystems
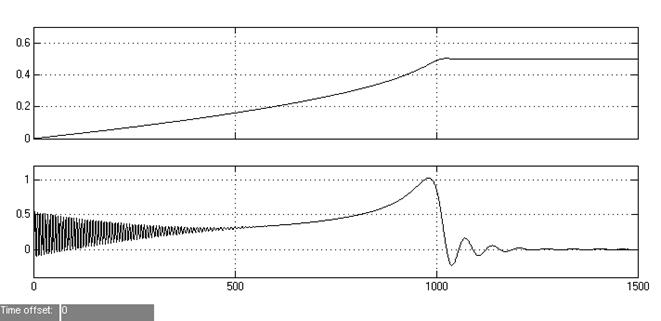
Рис. 72.График прямого пуска АД во вращающейся системе координат
|
|