Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Обобщенная схема многоконтурной системы подчиненного регулирования
|
|
В основе построения систем подчиненного регулирования (СПР) лежит определенное структурное представление объекта регулирования, т.е. силовой части электропривода. Обобщенная структурная схема многоконтурной СПР представлена на рис. 2.1.
Регулирующая часть | Силовая часть
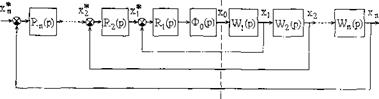 Рис. 27. Обобщенная структурная схема многоконтурной системы подчиненного регулирования
Рис. 27. Обобщенная структурная схема многоконтурной системы подчиненного регулирования
|
Объект регулирования представлен в виде цепи последовательно соединенных звеньев направленного действия, передаточные функции которых обозначены как
 i=1, ……n
i=1, ……n
где n - количество звеньев модели объекта.
Разбиение модели объекта на звенья производится с таким расчетом, чтобы выходными величинами звеньев X1,... Хn оказались физические величины, представляющие интерес с точки зрения регулирования и контроля (ток якоря, скорость вращения двигателя, угол поворота вала и т.д.).
Регулирующая часть системы починенного регулирования строится следующим образом.

|
1. На входе объекта регулирования (или же на выходе регулирующей части) устанавливается фильтр, ограничивающий полосу пропускания системы и обеспечивающий ее помехозащищенность. Передаточная функция этого фильтра обычно представляется в виде:
где - называется базовой или некомпенсируемой постоянной
времени системы подчиненного регулирования.
2.. Для каждой из регулируемых величин X1,...Xn
предусматривается замкнутая САР с регулированием по отклонению. Каждая САР снабжена индивидуальным регулятором, передаточная функция которого обозначается как
Таким образом, количество регуляторов СПР равно количеству регулируемых величин объекта.
Для формирования сигнала обратной связи в каждой из САР предусматривается датчик соответствующей регулируемой величины, передаточную функцию которого обозначим как
В первом рассмотрении примем
 =1
=1
г.е. будем рассматривать систему с идеализированными датчиками, обеспечивающими безынерционные единичные обратные связи. Вопросы учета не идеальности датчиков будут служить предметом отдельного анализа, развивающего исходные принципиальные положения теории построения СПР.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
3. Подобно звеньям объекта регуляторы соединяются между собой последовательно, но в обратном порядке по отношению к порядку связи звеньев объекта. Сигналы задания для каждой из регулируемых величин Х1..., Xn обозначены соответственно X1*……Xn*. Каждый последующий (по мере возрастания номера) регулятор вырабатывает задание для предыдущего регулятора. Так как в структуре САР можно выделить ряд последовательно вложенных друг в друга контуров, то общее название этих систем - многоконтурныс системы подчиненного регулирования.
Вследствие последовательной подчиненности регуляторов и образуемых с их помощью локальных САР регулируемые величины не равноценны между собой. Основной (главной) из них является величина х„, процессу регулирования которой подчиняются процессы регулирования всех остальных величин.
|
|