Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Выбор преобразователя частоты
|
|
4.2 Преобразователь частоты серии Altivar
Из предложенного на рынке оборудования частотного регулирования наиболее выгодную позицию занимает ПЧ компании Schneider Electric серии Altivar (рис. 52). Имея в своей структуре базовые элементы системы автоматического управления и регулирования, а также возможность наращивания дополнительного функционала, ПЧ обеспечивают высокую гибкость в процессе интеграции в существующие системы.
Преобразователь Altivar оптимально решает любые задачи с учетом особенностей каждого механизма, имеет открытую архитектуру для всех коммуникационных сетей и адаптируемый к различным применениям, в том числе для привода штанг толкателя блюмов. Имеют гибкое программирование с возможностью создавать программы диспетчерского управления с полным отображением технологического процесса по всему цеху/заводу на базе ПЧ.

Рис. 60 Преобразователи частоты Altivar.
Преобразователи Altivar обладают следующими номиналами и характеристиками:
· 0, 75 - 500 кВт, трехфазное питание 380 - 500 В;
· 0, 37-75 кВт, трехфазное, либо однофазное питание 200 - 240В;
· встроенные фильтры ЭМС класса А;
· нормы и сертификаты: UL, CSA, СЕ, Ctick;, ГОСТ;
· пусковой момент до 220% Мп;
· векторное управление потоком в замкнутой или разомкнутой системе с асинхронными двигателями;
· автоподстройка к параметрам двигателя;
· регулирование скорости или момента;
· выходная частота до 1000 Гц;
· управление синхронными двигателями в разомкнутой системе.
Многофункциональность базового модуля (прикладные задачи, входы-выходы, коммуникационные протоколы) значительно расширяется за счет дополнительных:
· карт входов-выходов;
· интерфейсных карт импульсного датчика;
· коммуникационных карт;
· программируемой карты встроенного контроллера;
· минимальное время реакции при отработке команд: 2 ± 0, 5 мс;
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
· задание по импульсному или дифференциальному аналоговому входу;
· управление по основным коммуникационным сетям;
· позиционирование с помощью концевых выключателей с оптимизацией работы на нижней скорости;
· мультипараметрирование путем переключения комплектов параметров;
· высокая скорость и защита (выходная частота до 1000 Гц.);
· быстрая управляемая остановка при обрыве сетевого питания;
· управление по встроенной шине CANopen;
· защита двигателя от перенапряжений;
· ПИД-регулятор технологических переменных;
· высокое разрешение при цифровом задании скорости (1/32000);
· регулирование скорости или момента;
· подключение к основным коммуникационным сетям;
· раздельное питание цепей управления;
· тормозной модуль с рекуперацией энергии в сеть;
· подключение к общей сети постоянного тока;
· высокое разрешение задающего сигнала;
· точность поддержания скорости вне зависимости от нагрузки при использовании синхронного двигателя;
· полоса пропускания до 50 Гц;
· функция управления намоткой;
· подключение к общей сети постоянного тока;
· минимальное время реакции при изменении задания 2 ± 0, 5мс;
· позиционирование с помощью концевых выключателей;
· постепенное изменение выходной частоты в соответствии с заданной скоростью по линейному или по предварительно заданному закону;
· применение S-образных (рис.53.) и U-образных (рис.54.) кривых позволяет выбрать механический зазор, устранить удары и ограничивает несовпадение скорости с заданием во время быстрых переходных процессов в случае большого момента инерции;
· выбор линейных, S- или U-образных кривых относится как к разгону, так и к торможению.
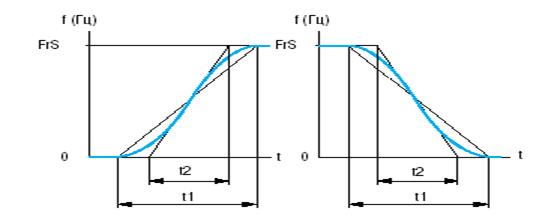
Рис 61. S – образная кривая.
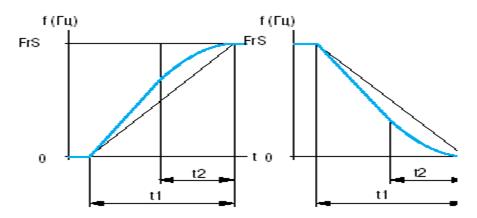
Рис 62 U – образная кривая.
где FrS – номинальная частота напряжения питания двигателя;
t1 – настраиваемое время разгона торможения;
t2 = 0.6 x t1;
фиксированный коэффициент сглаживания.
|
|