Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Тормозные режимы для двигателей постоянного тока с последовательным возбуждением.
|
|
 Для двигателя последовательного возбуждения возможны лишь два режима электрического торможения противовключением и динамическое Режима рекуперативного торможения у двигателей этого типа нет, так как э д с не может быть выше напряжения сети в связи с тем, что скорость идеального холостого хода не имеет конечной величины.
Для двигателя последовательного возбуждения возможны лишь два режима электрического торможения противовключением и динамическое Режима рекуперативного торможения у двигателей этого типа нет, так как э д с не может быть выше напряжения сети в связи с тем, что скорость идеального холостого хода не имеет конечной величины.
Динамическое торможение может быть осуществлено двумя способами с самовозбуждением (рис 8, а) и с независимым возбуждением (рис 8, 6) При торможении с самовозбуждением необходимо сохранить направление тока возбуждения таким же, как при нормальной работе двигателя Без этого машина размагнитится и торможения не получится
 Механические характеристики режима динамического торможения (см рис 7, четыре засечки) нелинейны вследствие непостоянного магнитного потока В области, обозначенной пунктирными линиями, торможение практически отсутствует Рассмотренный ре жим используют редко, в основном как аварийный при исчезновении напряжения сети
Механические характеристики режима динамического торможения (см рис 7, четыре засечки) нелинейны вследствие непостоянного магнитного потока В области, обозначенной пунктирными линиями, торможение практически отсутствует Рассмотренный ре жим используют редко, в основном как аварийный при исчезновении напряжения сети
Механические характеристики динамического торможения с независимым возбуждением аналогичны соответствующим характеристикам двигателя параллельного возбуждения (см. рис. 7, две засечки). Такой способ торможения нашел широкое применение в приводе рудничных электровозов, ходового механизма роторных экскаваторов и др.
Торможение противовключением осуществляется, как и у двигателей параллельного возбуждения, двумя способами: включением в цепь якоря реостата с большим сопротивлением и изменение полярности обмотки якоря.
При первом способе механическая характеристика будет продолжением характеристики двигательного режима (см. рис. 7, (засечки в квадранте IV). При торможении противовключением л второму способу характеристика располагается в квадранте (линия стремя засечками).
Двигатель со смешанным возбуждением имеет две обмотки возбуждения: последовательную ОВпосл и параллельную ОВпар (см. рис. 5, г), которые совместно создают поток возбуждения машины. Механическая характеристика имеет промежуточную форму между характеристиками двигателей с последовательным и независимым возбуждением, приближаясь к той или иной в зависимости от соотношения магнитодвижущих сил этих обмоток. Механические характеристики смягчаются с увеличением сопротивления в цепи якоря. Благодаря магнитному потоку параллельной обмотки возбуждения опасность разноса на холостом ходу у этих электродвигателей отсутствует. Угловая скорость идеального холостого хода у двигателя со смешанным возбуждением имеет конечно значение за счет потока параллельной обмотки возбуждения.
Двигатели со смешанным возбуждением допускают все три режима электрического торможения: рекуперативное с отдачей энергии в сеть, динамическое и противовключением.
Лекция 5. ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА.
Как правило в горнорудной промышленности применяются три типа двигателей переменного тока:
L Асинхронные двигатели с короткозамкнутым ротором;
L Асинхронные двигатели с фазным ротором;
L Синхронные электродвигатели.
Благодаря надежности, простоте конструкции и обслуживания, необязательности преобразователя и другим положительным свойствам асинхронные электродвигатели чрезвычайно широко применяются в подземных выработках и на поверхности шахты на открытых горных работах (привод горных комбайнов, комплексов, конвейеров, подъемных лебедок, насосов, вентиляторов, буровых станков, толкателей и т. п.). Вместе с тем их механические характеристики недостаточно соответствуют требованиям горных машин, производящих резание и разрушение горных пород; еще окончательно не решен вопрос регулирования скорости. В большинстве случаев применяют асинхронные электродвигатели с короткозамкнутым ротором и значительно реже—электродвигатели с фазным ротором.
Схема включения асинхронного электродвигателя с короткозамкнутым ротором показана на рис. 7.1, а. Механическая характеристика двигателя выражает зависимость между вращающим моментом и частотой вращения n, угловой скоростью ω или скольжением s.
Упрощенное уравнение механической характеристики асинхронного двигателя (формула Клосса) имеет вид:

где М — момент вращения на валу двигателя, соответствующий определенному скольжению s; Мк— величина критического момента, т, е. момента при критическом скольжении sк.
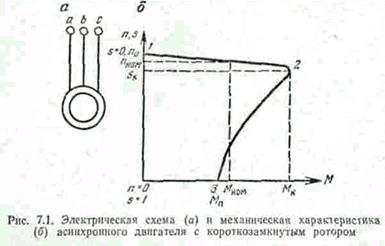 Зная величину Mu и sk и задаваясь значениями s, можно построить механическую характеристику асинхронного двигателя (рис. 7.1, б).
Зная величину Mu и sk и задаваясь значениями s, можно построить механическую характеристику асинхронного двигателя (рис. 7.1, б).
Участок 1, 2 представляет собой рабочую, устойчивую часть характеристики, на которой двигатель работает устойчиво. Потеря скорости при изменении нагрузки составляет 3—6% номинальной, поэтому эту часть характеристики относят к разряду жестких.
Участок характеристики 2, 3— нерабочий. Двигатель работать под нагрузкой на этой части характеристики не может, поэтому эту часть характеристики называют неустойчивой.
Отношение критического момента Мк номинальному Мном называется перегрузочной способностью двигателя λ:

Отношение пускового момента Мп к номинальному Mнoм называется кратностью пускового момента

Для двигателей общего назначения обычно и, λ = 1.8 - 3; kп = 0, 6 - 0, 9. При пересечении характеристики с ординатой получаем синхронную частоту вращения по, которая определяется по формуле
где f— частота переменного тока; р— число пар полюсов статорной обмотки.
Такой частоты вращения ротор двигателя не может достичь самостоятельно, так как для этого необходимо, чтобы момент сопротивления был равен нулю.
Величина пускового тока в 3—8 раз больше номинального, т. е. Iп = (3—8) Iном, поэтому недопустимо держать включенным двигатель, если он не развернулся после включения или если он опрокинулся (остановился) в результате перегрузки.
Трехфазный асинхронный электродвигатель с короткозамкнутым ротором имеет следующие положительные качества: простота конструкции; отсутствие нормально искрящих частей; большая перегрузочная способность и жесткость характеристики; надежность в работе и дешевизна в изготовлении.
Наряду с положительными качествами электродвигатель с короткозамкнутым ротором имеет следующие недостатки: высокая чувствительность двигателя к колебаниям напряжения; большой пусковой ток; малый пусковой момент.
Учитывая особенности механической характеристики асинхронных электродвигателей с короткозамкнутым ротором, применять их рекомендуется для установок с жесткой характеристикой, перегружаемых в процессе работы и запускаемых без нагрузки.
Трехфазные асинхронные двигатели с короткозамкнутым ротором общего назначения из-за малых пусковых моментов и больших пусковых токов мало пригодны для привода горных машин. Для них созданы специальные короткозамкнутые электродвигатели с уменьшенным пусковым током и увеличенным пусковым моментом.
|
|