Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Режим магнитной коррекции
|
|
Как уже отмечалось, в режиме «ГПК» курсовая система работает аналогично обычному гирополукомпасу, поэтому этот режим не требует дополнительного отдельного рассмотрения.
Рассмотрим работу курсовой системы в режиме магнитной коррекции, в котором наиболее ярко проявляются достоинства совместного использования положительных сторон как магнитного, так и гироскопического принципов измерения курса.
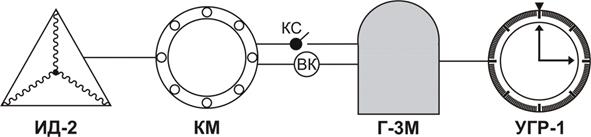
Рис. 5.46. Работа курсовой системы в режиме магнитной коррекции
В режиме «МК» задействованы все основные части курсовой системы (рис. 5.46). Начнем рассмотрение работы данного режима с конца.
В первую очередь нужно иметь в виду, что на указателях всегда, независимо от режима работы системы, индицируется курс, равный углу между осью гироскопа и продольной осью самолета. Так же сделано и в обычных гирополукомпасах, например, в ГПК-52. Но в ГПК-52 и в режиме «ГПК» курсовой системы гироскоп остается свободным и сохраняет направление меридиана начальной выставки. В режиме «МК» он не сохраняет выставленное положение, а «по подсказке» индукционного датчика в процессе полета непрерывно ориентируется по направлению текущего магнитного меридиана. Эту задачу решает следящая система, которая работает следующим образом.
Индукционный датчик измеряет компасный курс, который в виде электрического сигнала через коррекционный механизм поступает в гироагрегат. Поскольку нормальная статическая девиация после коррекционного механизма уже полностью или частично устранена, будем называть его магнитным курсом. Если направление оси гироскопа в ГА не совпадает с направлением магнитного меридиана, которое определил ИД, то начинает работать электродвигатель следящей системы. Он создает момент сил, который разворачивает ось гироскопа в сторону меридиана. А пилот, как уже отмечалось, и видит на указателе курса угол между осью гироскопа и продольной осью ВС.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
Таким образом, на протяжении всего полета следящая система стремится удерживать ось гироскопа по направлению магнитного меридиана места самолета и, следовательно, на указателе должен индицироваться текущий магнитный курс.
Может возникнуть вопрос, а какова тут вообще роль гироскопа? Зачем нужно сначала разворачивать ось гироскопа по меридиану, а потом уже показывать от этой оси курс? Не проще ли сразу сигнал, соответствующий магнитному курсу, подать от КМ на указатель? Конечно, можно. Но такой магнитный курс включал бы в себя все случайные флуктуационные погрешности из-за ускорительной и креновой девиации, влияния полей, создаваемых электрическими цепями самолета, и т.п. Поэтому даже при строго прямолинейном полете такой курс на указателе непрерывно бы изменялся, становясь то больше, то меньше фактического. А ведь пилот должен выдерживать заданный ему курс. Ему бы пришлось, работая рулями, непрерывно отслеживать все эти колебания курса, «гоняясь» за заданным. В результате ВС на самом деле летело бы уже не прямолинейно.
Избавиться от мелких колебаний магнитного курса как раз позволяет гироскоп. Основная идея заключается в том, что согласование магнитного (измеренного ИД) и гироскопического (отсчитываемого от оси гироскопа) курсов осуществляется очень медленно. Двигатель механизма магнитной коррекции поворачивает ось гироскопа в сторону магнитного меридиана со скоростью 1-5° в минуту и из-за такой маленькой скорости гироскоп просто не успевает отслеживать быстроменяющиеся погрешности курса. Например, возникла девиация величиной +5°, то есть на такую величину разошлись значения гироскопического и измеренного магнитного (компасного) курсов. Двигатель тут же начнет поворачивать ось гироскопа так, чтобы устранить это расхождение. Но не успеет он его устранить, как погрешность возможно приняла уже другую величину и противоположный знак. И двигатель, так и не успев значительно отвести ось гироскопа от первоначального положения, будет теперь поворачивать эту ось уже в другую сторону. Таким образом, гироскоп как бы сглаживает, демпфирует, фильтрует погрешности. Вследствие этого индицируемый на указателе курс является более устойчивым, более плавно меняющимся и более близким к фактическому магнитному курсу. Такой сглаженный гироскопом курс называют гиромагнитным.
Такой симбиоз магнитного и гироскопического датчиков курса позволяет взаимно компенсировать их недостатки и использовать достоинства. Гироскоп «не знает» направления магнитного меридиана, но ему «подсказывает» ИД, устраняя заодно и уход гироскопа из-за вращения Земли. В свою очередь, гироскоп фильтрует погрешности магнитного курса, поступающего от ИД.
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
Таким образом, главную роль в режиме «МК» играет малая скорость согласования гироскопического и магнитного курсов. Но иногда требуется большая скорость. Например, при включении курсовой системы ось гироскопа находится в произвольном положении и может на десятки градусов отстоять от направления магнитного меридиана. Конечно, двигатель в конце концов приведет ее к нужному положению, но это может занять очень много времени. Для того, чтобы согласование проходило быстрее, имеется «кнопка быстрого согласования», которая в нажатом положении увеличивает скорость работы следящей системы примерно до 10° в секунду. Ось гироскопа быстро устанавливается по направлению магнитного меридиана и указатель покажет магнитный курс. При отпускании нажатой кнопки скорость согласования вновь становится медленной. Кнопка согласования используется и в полете всякий раз, когда нужно быстро привести ось гироскопа к текущему магнитному меридиану (например, после разворота).
Во время разворота возникает ускорительная девиация (поворотная ошибка) индукционного датчика, которая может достигать значительных величин. В этом случае за время разворота ИД может «увести» ось гироскопа от настоящего магнитного меридиана. Чтобы этого не происходило, уже упоминавшийся выключатель коррекции (ВК) через несколько секунд после начала разворота автоматически отключает магнитную коррекцию, то есть разрывает связи ИД с гироагрегатом. Гироскоп становится свободным, то есть ведет себя как в режиме «ГПК», сохраняя то направление, которое было в момент отключения. Но и сам гироскоп, как известно, подвержен виражной погрешности, вызываемой работой механизма горизонтальной коррекции. Из-за нее он во время разворота может уйти от заданного направления. Чтобы этого не происходило, тот же ВК выключает и механизм горизонтальной коррекции (жидкостной маятниковый переключатель).
Когда ВС вышло из разворота, ВК включает оба вида коррекции и ось гироскопа вновь продолжает отслеживать направление магнитного меридиана.
|
|