Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Структура СПРК.
|
|
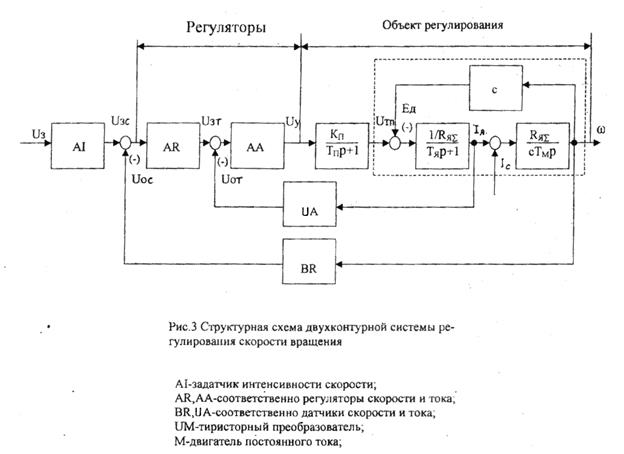
В связи с расширением использования полупроводниковой техники управления и созданием унифицированных блочных систем регуляторов (УБСР), предназначенных для управления электроприводами, практический интерес представляет последовательная коррекция контуров регулирования. При подчиненном регулировании координат система электропривода разделяется на группы звеньев, в каждой из которых, как правило, имеется только одна большая постоянная времени. Каждая из таких групп звеньев включается в контур регулирования со своим регулятором и обратной связью. В результате система получается многоконтурной, причем каждый последующий контур охватывает предыдущий. Выходные величины регуляторов внешних контуров регулирования оказываются входными для внутренних контуров регулирования.
Требуемые показатели качества регулирования в оптимизированном контуре (колебательность и перерегулирование) обеспечиваются выбором отношения постоянных времени а, а быстродействие определяется только величиной суммарной некомпенсированной постоянной времени Тμ .
где  — суммарная некомпенсированная постоянная времени контура регулирования.
— суммарная некомпенсированная постоянная времени контура регулирования.
а=Т0 /Тμ =2
При а=2 обеспечивается время регулирования, то есть когда регулируемая переменная первый раз достигает установившейся величины, tp1 = 4, 7 Тμ при перерегулировании меньшем 5 %. Полученный оптимум принято называть «техническим» или «модульным».
Настройка на модульный оптимум обеспечивает наилучшие показатели регулирования по каналу управления, но не обеспечивает быстрой реакции системы на возмущение. Таким образом, для компенсации влияний возмущений регулятор должен быть настроен на «Симметричный Оптимум» (а=Т0/Тμ =4). В этом случи регулируемая переменная первый раз достигает установившейся величины, tp1 = 3, 1 Тμ
|
|