Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Для новых пользователей первый месяц бесплатно. Чат-бот для мастеров и специалистов, который упрощает ведение записей: — Сам записывает клиентов и напоминает им о визите;
— Персонализирует скидки, чаевые, кэшбэк и предоплаты;
— Увеличивает доходимость и помогает больше зарабатывать; Начать пользоваться сервисом

Проектування синхронних реактивних двигунів
|
|
Реактивний двигун не має обмотки збудження. Його головний магнітний потік створюється за рахунок намагнічуючого струму обмотки статора. В двох- і трифазних двигунах обмотка статора створює обертове магнітне поле.
При відсутності магнітного потоку збудження полюсів ротора (Е0=0) перша складова, що являє собою головний момент, рівно нулю.
Таким чином, в реактивному двигуні діє лише реактивний момент
 , (39)
, (39)
який і приводить ротор двигуна в обертання з синхронною частотою обертання n1.
Необхідною умовою виникнення реактивного моменту являється нерівність індуктивних опорів обмотки статора по повздовжній і поперечній вісям (xd> xq), що має місце лише при явнополюсному роторі. Тому, ротор реактивного двигуна обов’язково повинен бути явнополюсним.
Конструктивно реактивний двигун відрізняється від асинхронного лише ротором. Найбільш часто в реактивних двигунах використовується ротор, пристрій якого зображений на рис.18.1, а. Цей ротор відрізняється від короткозамкненого ротора асинхронного двигуна лише наявністю впадин-вирізів на циліндричній поверхні, які утворюють явно виражені полюси. Короткозамкнена обмотка ротора забезпечує асинхронний пуск реактивного двигуна.
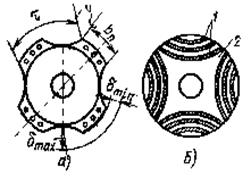
Рис. 18.1, а) ротор, б) ротор з алюмінію
В реактивних двигунах, призначених для роботи в схемах синхронного зв’язку, ротор виготовляють з алюмінію 2, в який при відливці укладають полоси з сталі 1 (рис. 18.1, б).
В системах автоматики часто використовують однофазні реактивні двигуни. Обмотку статора цих двигунів виконують такою ж, як і у асинхронних конденсаторних двигунів, і вмикають за аналогічними схемами.
Обертання ротора реактивного двигуна відбувається під дією реактивного моменту. З виразу, що визначає величину реактивного моменту, випливає, що максимальне значення моменту Мр max наступає при навантаженні, що відповідає куту qкр=450 (рис. 18.2, крива 1).
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
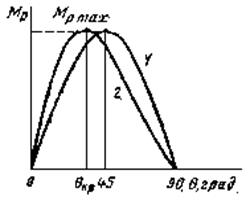
Рис. 18.2. Максимальне значення моменту Мр.
Під впливом активного опору обмотки статора максимальне значення реактивного моменту наступає при qкр< 450 (qкр=30¸ 400). Це збільшує крутизну кривої Мр=f(q) в її початковій частині (рис.18.2, крива 2), а тому, підвищує величину питомого синхронізуючого моменту М пит.
Питомий синхронізуючий момент - це момент, що приходиться на 10 кута q Мпит = DМр/Dq і визначає стійкість роботи реактивного двигуна.
Максимальний момент реактивного двигуна прийнято називати моментом виходу з синхронізму. Справа в тому, що якщо навантаження на валу двигуна досягне значення, при якому кут q> qкр, відбудеться “випадання” двигуна із синхронізму. В цьому випадку ротор двигуна або зупиняється, або продовжує обертатися асинхронно під дією електромагнітного моменту, що створюється струмами пускової короткозамкненої обмотки.
Величина реактивного моменту пропорційна квадрату підведеної до двигуна напруги
( ). Тому, реактивні двигуни досить чутливі до коливань напруги мережі.
). Тому, реактивні двигуни досить чутливі до коливань напруги мережі.
Представимо індуктивні опори обмотки статора по повздовжній xd і поперечній xq вісям у вигляді
xd = 2pf1Ld; xq = 2pf1Lq, (40)
де Ld i Lq - індуктивності обмотки статора по повздовжній і поперечній вісям:
 (41)
(41)
причому Ld i Lq - магнітні провідності по повздовжній і поперечній вісям машини.
Підставивши вирази (40) і (41) у вираз, отримаємо формулу реактивного моменту:
 (42)
(42)
де RMq=1/Lq i RMd=1/Ld - магнітні опори по поперечній і повздовжній вісям машини.
З формули (42) випливає, що реактивний момент пропорційний різниці магнітних опорів по поперечній Rmq i повздовжній Rmd вісям машини.
З заглибленням впадин на роторі (див. рис.18.1, а) збільшується різниця магнітних опорів по поперечній і повздовжній вісям і реактивний момент збільшується, а тому, збільшується і мемент виходу із синхронізму.
Але заглиблення впадин на роторі доцільне лише до визначеної межі, так як з збільшенням глубини впадин збільшується середня величина повітряного проміжку. Це веде до зменшення обертового моменту в пусковому асинхронному режимі. Останнє приводить до зниження пускового моменту і моменту входу двигуна в синхронізм - найбільшого моменту опору, при якому ротор двигуна ще втягується в синхронізм. Для втягування в синхронізм необхідна частота обертання ротора не менше 0, 95n1, тобто ковзання s£ 0, 05.
На рис.18.3 зображений ряд залежностей електромагнітного моменту від ковзання при різних значеннях активного опору пускової клітки, причому  Величина моменту входа в синхронізм визначається ковзанням s=0, 05. З зроблених на рисунку побудов видно, що чим більший активний опір пускової клітки, тим менший момент входу в синхронізм.
Величина моменту входа в синхронізм визначається ковзанням s=0, 05. З зроблених на рисунку побудов видно, що чим більший активний опір пускової клітки, тим менший момент входу в синхронізм.
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
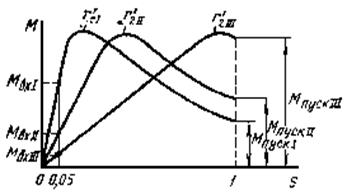
Рис. 18.3. Ряд залежностей електромагнітного моменту від ковзання
Встановлено, що найкраще відношення між максимальним моментом (моментом виходу із синхронізму), початковим пусковим моментом і моментом входу в синхронізм отримується при слідуючих відношеннях дуги bп до полюсного поділу t і максимального повітряного проміжку dmax до мінімального dmin (див. рис.18.1, а):
bп/t = 0, 5¸ 0, 6; dmax/dmin = 10¸ 12. (43)
Істотний недолік реактивних двигунів - низький коефіцієнт потужності, що обумовлено значною величиною намагнічуючої складової струму статора.
Нагадаємо, що в реактивному двигуні магнітний потік створюється виключно струмом статора: крім того, середнє значення повітряного проміжку через наявність впадин на роторі досить велике, що веде до підвищення опору магнітного кола машини. Вказані обставини являються також причиною низього ККД, який в двигунах потужністю в декілька десятків ват, як правило, складає 30¸ 40%, а в двигунах потужністю до 10 Вт - не перевищує 20%.
За габаритами реактивні двигуни більші синхронних і асинхронних двигунів звичайного типу, що пояснюється низьким ККД, малим cosj1 і невеликою величиною реактивного моменту.
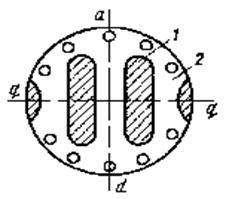
Рис. 18.4. Синхронний реактивний двигун.
В останній час з’явились синхронні реактивні двигуни, у яких значна різниця магнітних опорів по поперечній і повздовжній вісям утворюється не за рахунок глибини міжполюсних впадин, а за рахунок внутрішніх вирізів 1 в шихтованому сердечнику 2 ротора (рис. 18.4). Ці вирізи, як правило, заливаються алюмінієм. Такі двигуни володіють підвищеними пусковими і робочими властивостями.
|
|