Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Для новых пользователей первый месяц бесплатно. Чат-бот для мастеров и специалистов, который упрощает ведение записей: — Сам записывает клиентов и напоминает им о визите;
— Персонализирует скидки, чаевые, кэшбэк и предоплаты;
— Увеличивает доходимость и помогает больше зарабатывать; Начать пользоваться сервисом

Проектування асинхронного тахогенератора (АТГ).
|
|
В схемах автоматики асинхронні тахогенератори виконують такі ж функції, як і тахогенератори постійного струму. Вони також діляться на точні, призначені для роботи в диференційних і інтегруючих схемах, і менш точні, призначені для слідкуючих систем в колах зворотнього зв’язку за швидкістю.
На відміну від тахогенераторів постійного струму асинхронні тахогенератори являються безконтактними (не мають ковзаючих контактів), а тому, вони більш надійні.
Принцип дії асинхронного тахогенератора
Принцип дії асинхронного тахогенератора полягає в слідуючому. Змінний струм збудження створює пульсуючий потік Фd1, який, пронизуючи порожнистий ротор, наводить в ньому ЕРС трансформації. Контури струмів ротора від ЕРС трансформації розташовуються в площинах, перпендикулярних потоку збудження (рис. 16.1, а). Вони створюють потік ротора Фтр2, який напрямлений назустріч потоку збудження і компенсується підвищуючим струмом обмотки збудження.
При обертанні ротора його “волокна” перетинають потік збудження і в них, крім ЕРС трансформації, наводяться ще ЕРС обертання (різання). Під дією ЕРС обертання по ротору протікають струми, контури яких при великому активному опорі ротора практично співпадають з віссю потоку збудження Фd1 (рис.16.1, б). Ці струми створюють магнітний потік ротора Фq2, який напрямлений по поперечній вісі тахогенератора. Потік Фq2 зчіплюється з витками генераторної обмотки ОГ і наводить в них ЕРС Етг — вихідну ЕРС тахогенератора. Так як потік Фq2 змінюється з частотою мережі, то і частота вихідної ЕРС рівна частоті мережі і не залежить від частоти обертання ротора.
ЕРС ротора, а тому, потік Фq2 і вихідна ЕРС пропорційні частоті обертання ротора:
Етт º Фq2 º n.
Вихідна напруга тахогенератора  менша ЕРС
менша ЕРС  на величину падіння напруги в генераторній обмотці з опором Zг:
на величину падіння напруги в генераторній обмотці з опором Zг:
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
 . (35)
. (35)
Головними вимогами, що пред’являються до вихідної характеристики асинхронного тахогенератора Uтг=f(n), являється:
лінійність Uтгº n;
постійніть фази при зміні n;
найбільша крутизна - велике DUтг при малих Dn;
симетрія — постійність | | при обертанні ротора в різних напрямках з однаковими частотами обертання;
стабільність - незалежність вихідної характеристики від температури, умов експлуатації, часу і т.п.
Особливо жорсткі вимоги пред’євляються до вихідної характеристики тахогенераторів, що працюють в пристроях, що роблять розрахунки (в диференціюючих і інтегруючих схемах).
Теоретично вихідну напругу тахогенератора може бути досліджено шляхом аналізу виразу вихідної характеристики:
 (36)
(36)
де k = k гwг/(k зwз) — коефіцієнт трансформації, тобто відношення ефективних чисел витків генераторної k г wг і збуджуючої k з wз обмоток (k г, k з - обмоточні коефіцієнти генераторної обмотки і обмотки збудження);  - напруга збудження; n=n/n1 — відносна частота обертання — відношення дійсної частоти обертання n до синхронної n1;
- напруга збудження; n=n/n1 — відносна частота обертання — відношення дійсної частоти обертання n до синхронної n1;  — комплексні коефіцієнти, що залежать від параметрів тахогенератора — його активних і індуктивних опорів.
— комплексні коефіцієнти, що залежать від параметрів тахогенератора — його активних і індуктивних опорів.
Лінійність вихідної характеристики — амплітудна похибка. Як видно з виразу (3.6), вихідна напруга Uтг не являється лінійною функцією частоти обертання n. Нелінійність з’являється за рахунок члену  . Якби він був рівний нулю, то Uтг була б пропорційна n і тахогенератор був би ідеальним.
. Якби він був рівний нулю, то Uтг була б пропорційна n і тахогенератор був би ідеальним.
При проектуванні тахогенераторів член Вn2 намагаються зменшити. Останнє досягається за рахунок зниження як n, та і В.
Щоб зменшити відносну частоту обертання n=n/n1=pn/(60f1), тахогенератори проектують на велику частоту f1 з найменшим числом пар полюсів р. Як правило, р³ 2. Тахогенератори з р=1 намагаються не проектувати, так як при цьому важко боротися з виникаючою магнітною і електричною асиметрією.
Коефіцієнт  можна записати як
можна записати як
 (37)
(37)
де Zн — опір навантаження тахогенератора; Zsз і rrз — повний опір обмотки збудження і активний опір ротора, приведений до обмотки збудження.
Щоб зменшити , працюють при великих опорах навантаження Zн, а ротор тахогенератора (для збільшення rrз) виконують з матеріалів з великим питомим опором — фосфористої або марганцової бронзи або із сплавів типу манганин, нейзильбер.
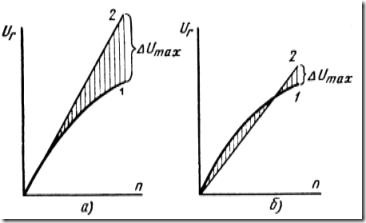
Рис.16.1. Реальна і ідеальна вихідні характеристики асинхронного тахогенератора
До зменшення коефіцієнту трансформації k=k гwг/(k зwз) і опору  , як правило, не удаються, так як перше веде до зниження крутизни вихідної характеристики (так як Етгº wг), а друге — до збільшення габаритів тахогенератора.
, як правило, не удаються, так як перше веде до зниження крутизни вихідної характеристики (так як Етгº wг), а друге — до збільшення габаритів тахогенератора.
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
Відхилення реальної 1 вихідної характеристики Uтг=f(n) від ідеальної 2 (прямолінійної) називається амплітудною похибкою тахогенератора DU (рис.16.1). Амплітудна похибка визначається як відношення (виражене в процентах) величини відхилення реальної вихідної характеристики від ідеальної (DUmax) до максимальної ЕРС генераторної обмотки Етг max. При налагодженні схеми тахогенератор потрібно відкалібрувати (встановити нахил ідеальної характеристики) таким чином, щоб амплітудна похибка була мінімальною. На рис.16.1, а і б приведені характеристики відповідно при неправильній і правильній калібровці.
Рис.16.2. До питання про розмагнічуючу дію генераторної обмотки
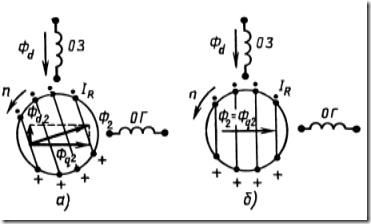
Рис. 16.3. До питання про напрямок потоку ротора в залежності від ЕРС обертання
Фізично наявність амплітудної похибки можна пояснити цілим рядом факторів: 1) падінням напруги в генераторній обмотці  ; 2) зменшенням потоку
; 2) зменшенням потоку  внаслідок розмагнічуючої дії магнітного потоку реакції генераторної обмотки
внаслідок розмагнічуючої дії магнітного потоку реакції генераторної обмотки  (рис.3.15) відхиленням потоку ротора
(рис.3.15) відхиленням потоку ротора  від поперечної вісі (рис.3.16, а) через зміну індуктивного опору розсіювання ротора х2 (потік ротора напрямлений чітко по поперечній вісі тільки тоді, коли індуктивний опір розсіювання ротора х2=0, рис.16.3, б); 4) зміною струму збудження Із, а тому, і магнітного потоку Фd1 в результаті дії додаткової ЕРС, наведеної в обмотці збудження потоком ротора Фd2; цей потік створюється струмами ротора, що виникають в результаті перетину поперечними “волокнами” ротора магнітного потоку Фq2 (рис. 16.4).
від поперечної вісі (рис.3.16, а) через зміну індуктивного опору розсіювання ротора х2 (потік ротора напрямлений чітко по поперечній вісі тільки тоді, коли індуктивний опір розсіювання ротора х2=0, рис.16.3, б); 4) зміною струму збудження Із, а тому, і магнітного потоку Фd1 в результаті дії додаткової ЕРС, наведеної в обмотці збудження потоком ротора Фd2; цей потік створюється струмами ротора, що виникають в результаті перетину поперечними “волокнами” ротора магнітного потоку Фq2 (рис. 16.4).
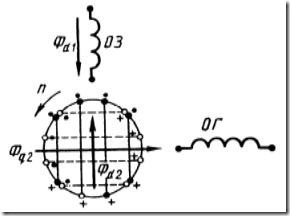
Рис.16.4. До питання про повздовжній потік ротора Фd2.
Для отримання мінімальної амплітудної похибки намагаються працювати при малих відносних частотах обертання n — зменшують діапазон робочих частот обертання до n=0, 2¸ 0, 25 в тахогенераторах слідкуючих систем і тахогенераторах для вимірювання частоти обертання. В перших з них DU=0, 05¸ 0, 1%, в других DU=0, 2¸ 2, 5%. Амплітудна похибка тахогенератора може бути значно зменшена у випадку використання визначеної за величиною активно-ємнісного навантаження (компаундування).
Фазова похибка. Вихідна напруга асинхронного тахогенератора Uтг не співпадає по фазі з напругою збудження і не залишається постійною по фазі при зміні частоти обертання. Відхилення вихідної напруги Uтг по фазі від вихідної, виміряної в кутових градусах або хвилинах, називається фазовою похибкою тахогенератора Dj. Фазова похибка в основному визначається індуктивними опорами ротора і обмоток статора. Величина її, так же як і величина амплітудної похибки, може бути значно знижена за рахунок правильного вибору характера навантаження. Фазову похибку можна усунути, використавши деяке активно-індуктивне навантаження, але, як слідує з вищевказаного, при цьому зростає амплітудна похибка.
Величина фазової похибки у сучасних тахогенераторів високої точності складає декілька хвилин, а у звичайних тахогенераторів — декілька градусів.
Слід відмітити, що як амплітудна, так і фазова похибки змінюються з зміною частоти обертання (рис. 16.5).
Крутизна вихідної характеристики. Чим більша крутизна вихідної характеристики
kтг = DЕтг/Dn,
тим більша чутливість тахогенератора і всієї автоматичної системи, в якій він працює.
Крутизна залежить від величини магнітного потоку збудження Фd1, опору ротора Z2, кількості витків генераторної обмотки wг. Чим більший потік обмотки збудження Фd1, тим більша ЕРС, струм ротора, потік Фq2, а тому, і вихідна напруга Uг. Чим менший Z2 і більша кількість витків генераторної обмотки wг, тим більший струм ротора і вихідна напруга тахогенератора Uтг, а значить, і його крутизна kтг.
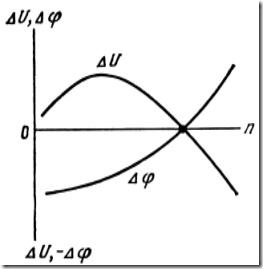
Рис. 16.5. Залежності DU=f(n) i Dj=f(n).
Збільшення крутизни вихідної характеристики тахогенератора майже завжди веде до збільшення його амплітудної і фазової похибок. Дійсно, підвищення крутизни потребує зменшення опору ротора Z2 (а він в основному активний), в той же час зниження r2 веде до зниження лінійності вихідної характеристики і до збільшення фазової похибки. Те ж саме можна сказати і про вплив wг. Тому при проектуванні тахогенераторів завжди виходять з того, що від нього потребується — або велика крутизна kтг, або менші похибки DU і Dj.
Крутизна сучасних тахогенераторів досить різноманітна і визначається призначенням тахогенератора. У точних тахогенераторів kтг=1¸ 3, а у тахогенераторів стежущих систем kтг=6¸ 10 мВ× хв/об.
Несиметрія вихідної характеристики. В схемах автоматики дуже важливо, щоб вихідна напруга Uтг тахогенератора за величиною не залежала від напрямку обертання. При зміні напрямку обертання тільки фаза вихідної напруги повинна змінюватися на зворотню (на 1800).
Практично у всіх тахогенераторів вихідна характеристика несиметрична — напруга Uтг=f(n) при обертанні ротора в різних напрямках має різну крутизну, особливо в початковій частині вихідної характеристики (при малих n).
Великий вплив на несиметрію спричиняє нульова (кінцева) ЕРС Етг0, тобто ЕРС, що наводиться в генераторній обмотці при нерухомому роторі. Теоретично при n=0 в генераторній обмотці не повинно наводитися ніяких ЕРС, так як обмотки wз і wг повинні мати просторовий зсув на 90 ел.град. Але зсув обмоток відрізняється від вказаного значення. Крім того, в тахогенераторах має місце: несиметрія магнітного кола (нерівність магнітних провідностей в різних радіальних напрямках), нерівномірність повітряного проміжку, неоднакова товщина стінок стакану ротора, наявність магнітних потоків розсіювання і ємнісних зв’язків між обмотками. В результаті в генераторній обмотці тахогенератора навіть при n=0 наводиться деяка Е0.
Величина кінцевої ЕРС змінюється за величиною при зміні положення ротора. Кінцеву ЕРС можна розділити на змінну (Е0var) і постійну (Е0const) складові. Постійна складова обумовлюється неточним зміщенням обмоток, магнітною несиметрією сталі і повітряного проміжку, наявністю потоків розсіювання і ємнісних зв’язків. У більшості тахогенераторів вона складає 25¸ 100 мВ. Змінна складова Е0var обумовлюється в основному неоднаковою товщиною (електричною провідністю) стінок стакана ротора і складає 3¸ 7 мВ.
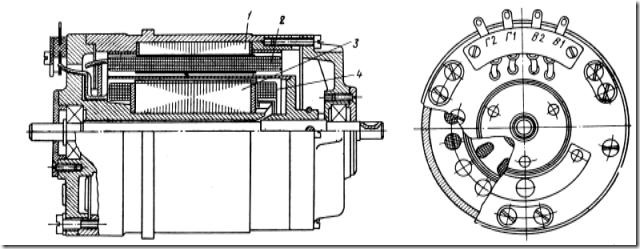
Рис.16.6. Асинхронний тахогенератор з порожнистим немагнітним ротором.
Для зниження постійної складової Е0const часто обмотки збудження і генераторну розташовують на різних статорах (рис.16.6) — одну 4 на внутрішньому статорі 3, другу 2 на зовнішньому статорі 1. При збірці тахогенератора внутрішній статор повертають, знаходять положення, що відповідає мінімальному значенню нульової ЕРС, і в цьому положенні закріплюють. Крім того, листи пакетів сталі статорів старанно ізолюють, а пакети добре обробляють.
Для зменшення змінної складової Е0var старанно обробляють (калібрують) ротор. В особливо точних тахогенераторах використовують додаткові компенсаційні обмотки, що вмикаються за спеціальними схемами.
Вихідна ЕРС тахогенератора фактично являє собою головну генераторну ЕРС  і кінцеву
і кінцеву 
 (37)
(37)
Так як при зміні напрямку обертання  залишається постійною, а змінює фазу на 1800, то, як видно з діаграми (рис.16.7), ЕРС
залишається постійною, а змінює фазу на 1800, то, як видно з діаграми (рис.16.7), ЕРС  змінюється по величині
змінюється по величині  ). Тому, важливим способом зниження несиметрії вихідної характеристики є зменшення нульової (кінцевої) ЕРС.
). Тому, важливим способом зниження несиметрії вихідної характеристики є зменшення нульової (кінцевої) ЕРС.
Стабільність вихідної характеристики. Дуже важливо, щоб вихідна характеристика тахогенератора була стабільною, тобто не залежала від зміни температури, навантаження, умов експлуатації, часу роботи і т.п.
В реальних тахогенераторах при зміні температури змінюються активні опори обмотки збудження, ротора, генераторної обмотки. В результаті вихідна характеристика дещо спотворюється.
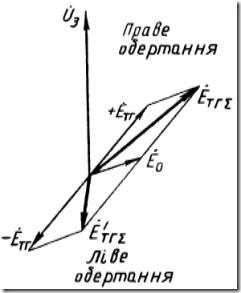
Рис.16.7. Вплив залишкової ЕРС на асиметрію вихідної напруги асинхронного тахагенератора
Характеристика тахогенератора видозмінюється внаслідок зміни насичення, наявності непостійного за величиною залишкового магнетизму, зміни величини і характеру навантаження і т.п. Нестабільність вихідної характеристики приводить до додаткових похибок, які називаються в залежності від фактора, що їх викликає: температурною, залишкового магнетизму, навантажувальною, частотною і т.п.
Методи боротьби з додатковими похибками тахогенератора самі різноманітні. Але більшість з них зводяться до стабілізації навантаження, частоти, вхідної напруги і т.п.
Позитивні якості розглядаючого тахогенератора — безконтактність, мала інерційність, висока надійність, малий момент опору.
Його недоліки – нелінійність вихідної характеристики, фазова похибка і нульова напруга, мала вихідна потужність при значних габаритах і вазі.
|
|