Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Зв’язкі та їх реакції.
|
|
Реакції зв'язків, для зв'язків, здійснюваних за допомогою яких-небудь тіл (див. Зв'язки механічні), — сили дії цих тіл на точки механічної системи. На відміну від активних сил, Р. с. є величинами заздалегідь невідомими; вони залежать не лише від вигляду зв'язків, але і від активних сил, що діють на систему, а при русі — ще і від закону руху системи і визначаються в результаті вирішення відповідних завдань механіки. Напрями Р. с. в деяких випадках визначаються виглядом зв'язків. Так, якщо через накладені зв'язки точка системи вимушена весь час залишатися на заданій гладкій (позбавленою тертя) поверхні, то Р. с. R направлена по нормалі n до цієї поверхні (мал. 1).
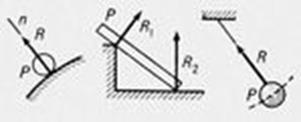
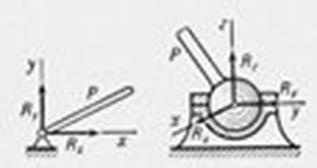
На мал.(малюнок) 2 показані гладкий циліндровий шарнір (підшипник), для якого невідомі дві (R x і R в ), і гладкий сферичний шарнір, для якого невідомі всі три (R x , R в , R z ) складові Р. с. Для шорсткої поверхні Р. с. має дві складові: нормальну і дотичну, звану силоміць тертя.
В загальному випадку при вирішенні завдань динаміки користуються принципом освобождаємості, тобто сковану механічну систему розглядають як вільну, прикладаючи до її крапок деякі сили, підібрані так, щоб у весь час руху системи виконувалися умови, що накладаються на неї зв'язками; ці сили і називаються Р. с.
|
|