Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Для новых пользователей первый месяц бесплатно. Чат-бот для мастеров и специалистов, который упрощает ведение записей: — Сам записывает клиентов и напоминает им о визите;
— Персонализирует скидки, чаевые, кэшбэк и предоплаты;
— Увеличивает доходимость и помогает больше зарабатывать; Начать пользоваться сервисом

Классификация кинематических пар
|
|
ГЛАВА I. СТРОЕНИЕ МЕХАНИЗМОВ
(Лекции 1 -- 2)
Основные понятия и определения.
Система терминов обеспечивает единообразный подход к описанию любой системы знаний. Поэтому начнем с уточнения смысла и значения используемых формулировок.
Механизм - система тел, предназначенных для преобразования движения одного или нескольких твердых тел и (или) сил, действующих на них, в требуемые движения других тел и (или) сил. В теории механизмов и машин под твердыми телами понимают как абсолютно твердые, так и деформируемые тела.
Машина – устройство, выполняющее механические движения для преобразования энергии, материалов и информации. Под материалами подразумевают объекты труда: обрабатываемые изделия, перемещаемые грузы и др.
Деталь – изделие, изготовленное из единообразного, по наименованию и марки материала, без применения сборочных операций.
Звено – твердое тело, участвующее в заданном преобразовании движения. Звено может состоять из нескольких деталей, не имеющих между собой относительного движения.
Стойка - звено, принимаемое условно за неподвижное.
Входное звено - звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев.
Выходное звено - звено, совершающее движение, для выполнения которого предназначен механизм.
Начальное звено – звено, которому приписывается одна или несколько обобщенных координат механизма.
Обобщенная координата механизма — каждая из независимых между собой координат, определяющих положение всех звеньев механизма относительно стойки.
Число степеней свободы механизма –число обобщенных координат механизма.
Связь – любое условие, которое уменьшает число степеней свободы механизма. Любую связь можно отбросить, заменив ее действие реакцией.
Избыточная связь – связь, устранение которой не изменяет число степеней свободы механизма.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
Кинематическая пара – соединение двух твердых тел механизма, допускающее их заданное относительное движение. Условием существования пары является: наличие двух звеньев, их контакт и относительное движение звеньев.
Кинематическая цепь – система звеньев и (или) твердотельных элементов механизма, образующих между собой кинематические пары. Различают кинематические цепи незамкнутые и замкнутые. Незамкнутой называется такая кинематическая цепь, у которой имеется хотя бы одно звено, входящее только в одну кинематическую пару. У замкнутой цепи нет звеньев, имеющих свободные элементы кинематических пар. Каждое звено такой цепи входит хотя бы в две пары.
Элемент механизма – твердотельный, жидкостный или газовый компонент механизма, обеспечивающий взаимодействие его звеньев, не контактирующих непосредственно друг с другом.
Элемент сопряжения кинематической пары – общая поверхность, линия или точка, образуемая сопрягаемыми элементами двух других тел.
Число степеней свободы (подвижность) кинематической пары (Н) – число независимых координат, необходимых для описания относительного положения звеньев кинематических пар.
Известно, что свободно движущееся тело в пространстве обладает шестью степенями свободы. Число условий связи S, наложенных на относительное движение звена кинематической пары может изменяться в пределах  . Различают одно-, двух-, трех, четырех- и пяти-подвижные кинематические пары. Следовательно, имеет место соотношение H = 6 – S.
. Различают одно-, двух-, трех, четырех- и пяти-подвижные кинематические пары. Следовательно, имеет место соотношение H = 6 – S.
Одноподвижная пара – кинематическая пара с одной степенью свободы в относительном движении соединяемых твердых тел.
Двухподвижная пара – кинематическая пара с двумя степенями свободы в относительном движении соединяемых твердых тел.
Трехподвижная пара – кинематическая пара с тремя степенями свободы в относительном движении соединяемых твердых тел.
Четырехподвижная пара – кинематическая пара с четырьмя степенями свободы в относительном движении соединяемых твердых тел.
Пятиподвижная пара – кинематическая пара с пятью степенями свободы в относительном движении соединяемых твердых тел.
Структурная формула – алгебраическое выражение, устанавливающее связь между числом степеней свободы механизма, числом подвижных звеньев, числом и подвижностью кинематических пар.
Группа Ассура – кинематическая цепь, присоединение которой к механизму или ее отсоединение образует механизм, имеющий подвижность, равную подвижности исходного механизма, не разделяемая на другие цепи с теми же свойствами.
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
Масштабный коэффициент – отношение численного значения физической величины в свойственных ей единицах к длине отрезка (мм), изображающего эту величину (на схеме, графике и т.п.).
Масштаб – величина, обратная масштабному коэффициенту.
Классификация кинематических пар
1. В зависимости от числа Н различают одно-, двух-, трех-, четырех-, и пятиподвижные кинематические пары. Число уравнений связей принимают за номер класса.
2. По характеру соприкосновения элементов звеньев (точнее виду элементов) пары делят на низшие и в ысшие (предложение Ф. Рело). К низшим относят кинематические пары, элементами которых являются поверхности (рис 1.2). Элементами высших пар являются линии или точки (рис 1.2).
3. По характеру сопряжения различают кинематические пары с силовым замыканием (соприкосновение звеньев обеспечивается действием какой - либо силы, например, веса или пружины) и кинематическим (постоянный контакт звеньев достигается за счет конструктивной формы элементов).
4. В зависимости от характера относительного движения звеньев кинематические пары подразделяют на поступательные, вращательные, винтовые, цилиндрические, сферические, плоскостные.
На рис. 1.1 изображены одноподвижные пары (кинематические пары V класса) рассмотрим их подробнее.
| |||||
| |||||
| |||||


|
Пара одноподвижная:
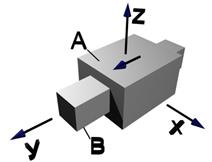
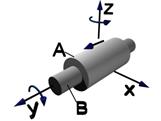
1) Вращательная (рис. 1.1. а) – цилиндрический шарнир. Наложено пять условий связи: исключены все движения, кроме вращательного.
2) Поступательная (рис. 1.1. б) – наложено пять условий связи: исключены все движения, кроме одного поступательного.
3) Винтовая (рис. 1.1. в) – наложено пять условии связи: исключены все движения, кроме поступательного. (Вращение не вносит степени свободы, т.к. в данном случае поступательное и вращательное движения не независимы).
На рис. 1.2 изображены пары двух-, трех-, четырех-, и пятиподвижные (кинематические пары IV, III, II и I классов) рассмотрим их подробнее.
|
|
| ||||||
| ||||||||


|
Пара двуподвижная (рис. 1.2.а) - втулка на валике. Наложено четыре условия связи, исключены поступательные и вращательные движения вдоль осей ОХ и ОZ.
Пара трехподвижная (рис. 1.2.б) - шаровой цилиндр. Наложено три условия связи: исключены поступательные движения вдоль всех трёх осей.
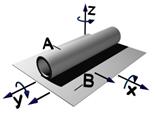
Пара четырехподвижная (рис. 1.2.в)- цилиндр на плоскости. Наложено два условия связи: исключено поступательное движение вдоль оси OZ и вращательное вокруг оси OX.
Пара пятиподвижная (рис. 1.2.г) - шар на плоскости. Наложено одно условие связи: исключено поступательное движение вдоль оси OZ.
|
|