Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Пневматическая система передачи измерительной информации
|
|
Системы передачи измерительной информации с унифицированным пневматическим сигналом находят применение в тех отраслях промышленности, где по условиям техники безопасности нецелесообразно использование электрических систем передачи. Пневматическая система передачи обеспечивает надежную передачу информации на расстояние до 300 м, а при использовании специального усилителя мощности – до 600 м. При больших расстояниях между объектом и пунктом приема информации точность системы передачи информации уменьшается.
Основными узлами ПИП является чувствительный элемент II и преобразователь «сила - давление» III. В качестве чувствительного элемента может быть использован любой чувствительный элемент, осуществляющий преобразование технологического параметра П в усилие.
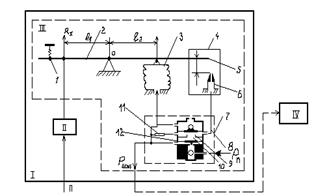
Рис 6.1. Преобразователь «сила - давление»
1. Корректор нуля 2. Рычаг; 3. Сильфон; 4. Пневмосопротивление типа «сопло - заслонка; 5. Заслонка; 6. Сопло; 7. пневматический усилитель мощности; 8. Мембрана; 9. Пружина; 10. Специальная мембрана; 11. Пневмосопротивление.
Преобразователь «сила - давление» состоит из корректора нуля – пружины 1, рычага 2, сильфона обратной связи 3, управляемого пневмосопротивления типа «сопло - заслонка» 4 и пневматического усилителя мощности 7. Управляемое пневмосопротивление 4 является индикатором перемещения рычага 2. Метание сопла производится через усилитель мощности 7 из линии выходного сигнала через постоянное пневмосопротивление 11. Поэтому сопротивление давление в камере Б всегда меньше, чем в камере А и В, на одно и то же значение, определяемое натяжением пружин 9. Преобразование технологического параметра П  в пневматический сигнал осуществляется следующим образом. При отклонении преобразуемого параметра П от исходного значения изменяется сила
в пневматический сигнал осуществляется следующим образом. При отклонении преобразуемого параметра П от исходного значения изменяется сила  , что приводит к перемещению рычага 2 относительно точки опоры О. Одновременно с рычагом перемещается и укрепленная на нем заслонка 5 относительно сопла 6. Это приводит к изменению зазора h между соплом и заслонкой. В результате зазор становится равным h1 и рычаг 2 занимает положение А (рис. 2).
, что приводит к перемещению рычага 2 относительно точки опоры О. Одновременно с рычагом перемещается и укрепленная на нем заслонка 5 относительно сопла 6. Это приводит к изменению зазора h между соплом и заслонкой. В результате зазор становится равным h1 и рычаг 2 занимает положение А (рис. 2).
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
Этому положению заслонки соответствует давление на выходе сопла, которое после усиления в усилителе мощности подается в сильфон отрицательной обратной связи 3 и в канал связи. Изменение Pвых происходит до тех пор, пока этим займет положение В, при котором расстояние между соплом и заслонкой станет равным h2. Расстояние h2 меньше расстояния h на  . Таким образом, в новом состоянии равновесия положение рычага уже не соответствует начальному, т.е. при работе преобразователя по схеме компенсаций усилий возникают перемещения, без которых преобразователь не может работать. Однако эти перемещения очень малы и определяются ходом заслонки относительно сопла (0, 01-0, 02 мм). Поэтому рычаг с заслонкой при малых усилиях остается практически в неизменном положении.
. Таким образом, в новом состоянии равновесия положение рычага уже не соответствует начальному, т.е. при работе преобразователя по схеме компенсаций усилий возникают перемещения, без которых преобразователь не может работать. Однако эти перемещения очень малы и определяются ходом заслонки относительно сопла (0, 01-0, 02 мм). Поэтому рычаг с заслонкой при малых усилиях остается практически в неизменном положении.
В процессе работы усилителя мощности 7 за счет перемещения мембран 8 и 10 перепад давлений на пневмосопротивлении 11 остается всегда постоянным (4000 – 6500 Па), что увеличивает крутизну статической характеристики преобразователя типа «сопло - заслонка» (рис. 6.2(б)).
Уравнения статической характеристики преобразователя «сила – давление» может быть получено из выражения, описывающего состояние равновесия рычага 2:
 (6.1)
(6.1)
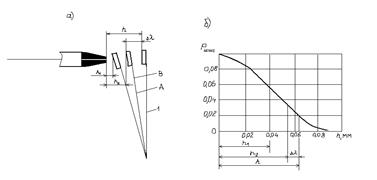
Рис 6.2. (а) пневсопротивление и
(б) статические характеристики.
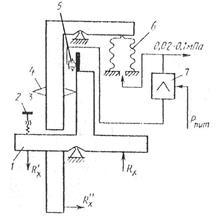
Рис 6.3. Схема унифицированного преобразователя «сила – давление»
1-Т-образный рычаг, 2-пружина корректора нуля, 3-Г-образный рычаг, 4-ножевая опора, 5-управляемое пневмосопротивление, 6- сильфон обратной связи, 7- усилитель мощности.
где  - усилие, развиваемое чувствительным элементом;
- усилие, развиваемое чувствительным элементом;
 - усилие, развиваемое сильфоном обратной связи.
- усилие, развиваемое сильфоном обратной связи.
Представляя величину в виде
 (6.2)
(6.2)
и решая совместно (6.1) и (6.2), получим
 (6.3)
(6.3)
где Fэф – эффективная площадь сильфона обратной связи.
Так как диапазон изменения унифицированного пневматического сигнала 0, 02 – 0, 1 МПа, то при Rx =0 путем натяжения пружины 1 корректора нуля осуществляют настройку нулевого сигнала преобразователя. В результате настройки зависимость (3) перемещается в виде:
 (6.4)
(6.4)
Это уравнение представляет собой статическую характеристику преобразователя «сила - давление». Оно может быть преобразовано в управление статической характеристики ПИП, если принять во внимание статическую характеристику чувствительного элемента:
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
 (6.5)
(6.5)
где k0 – коэффициент преобразователя чувствительного элемента.
С учетом (6.5) статическая характеристика ПИП примет вид:
 (6.6)
(6.6)
или
 (6.7)
(6.7)
Для преобразователя, настроенного на заданный диапазон преобразования, статическая характеристика (6.7) может быть представлена в виде
 (6.8)
(6.8)
Здесь  -коэффициент преобразования ПИП, при П=Пмах и Рвых=0, 1Мпа. Классы точности ПИП с унифицированным пневматическим сигналом 0, 5-2, 5.
-коэффициент преобразования ПИП, при П=Пмах и Рвых=0, 1Мпа. Классы точности ПИП с унифицированным пневматическим сигналом 0, 5-2, 5.
В качестве приемников информации в пневматических системах передачи широко применяются вторичные приборы, принцип действия которых основан на методе уравновешивающего преобразования. Эти приборы входят в ГСП и обеспечивают принципиально более высокую точность измерений, чем приборы прямого действия. Промышленность выпускает показывающие и самопишущие вторичные приборы с диапазоном измерений 0, 02 –0, 1 МПа.
Измеряемое давление P (рис. 6.4) преобразуется чувствительным элементом прибора – сильфоном 1 в силу N, под действием которой рычаг 2 и укрепленная на нем заслонка 3 перемещаются относительно сопла 4. Перемещение рычага 2 под действием указанных сил происходит до тех пор, пока момент М1, создаваемый силой N, не уравновесится моментом М2, создаваемым силой R. В состоянии равновесия, т.е. при
М1=М2 (6.9)
перемещение рычага прекращается.
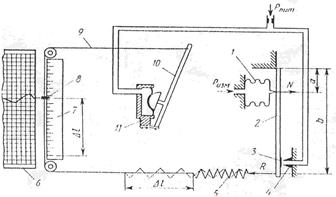
Рис 6.4. Схема самопишущего измерительного прибора пневматической системы передачи измерительной информации
В состоянии равновесия перемещение указателя по шкале пропорционально измеряемому давлению. С этой целью равенство (6.9) представим в виде
 (6.10)
(6.10)
где b и a – расстояния от точек приложения сил R и N до оси вращения рычага.
Принимая во внимание зависимости
 (6.11)
(6.11)
и
 (6.12)
(6.12)
преобразуем равенство (10):
 (6.13)
(6.13)
где  - деформация пружины, равная отклонению указателя; Fэф – эффективная площадь сильфона; С – жесткость пружины.
- деформация пружины, равная отклонению указателя; Fэф – эффективная площадь сильфона; С – жесткость пружины.
В выражении (6.13) не величины, за исключением P- постоянные. Поэтому уравнение (13) может быть представлено следующим образом:
 (6.14)
(6.14)
где  .
.
В настоящее время в промышленности освоено несколько модификаций вторичных приборов, простроенных по рассмотренной схеме. Шкала приборов процентная. Класс точности 1, 0.
|
|