Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Синтез моделей алгоритмів управління виробничими процесами ГВС
|
|
Третій етап проектування систем управління ГВС полягає в одержанні обумовленої виконуваним виробничим процесом структури процесу управління, а потім у формуванні коректного алгоритму управління. Оскільки в отриманій моделі N П можна реалізувати майже будь-яку послідовність рухів матеріального потоку, визначену в рамках сформованої специфікації предметної області ГВС, то структура процесу управління вважається цілком заданою та адекватно відтвореною у ІКСП, якщо з кожною виробничою операцією співставити оператор управління, який ініціює її виконання. Тоді задача синтезу алгоритму управління полягає у задані для множини переходів Т моделі виробничого процесу N П відображень h: P ´ W ® T, що адекватно визначають порядок реалізації операцій у конфліктних ситуаціях (P ´ W), та введенні додаткових елементів, що моделюють інформаційний обмін управляючої підсистеми і об’єкта управління.
Процес формування управління рухом матеріальних потоків по обробляючих ресурсах у ГВС полягає у встановленні в конфліктних ситуаціях невизначенності обслуговуємої заявки-предмета виробництва і засобу її обслуговування-ресурсу виробництва.
Згідно з таким поданням, конфліктні ситуації, що утворюються в ході виконання виробничого процесу (під час оперативно-диспетчерського управління), задаються наступними типовими ситуаціями:
– обслуговування заявок спільним засобом (ресурсом);
– надання засобів (ресурсів) спільній заявці;
– виконання незалежних однієї від одної операцій.
У сітковій моделі виробничого процесу виділені ситуації мають своє формалізоване подання у вигляді наступних типових конфліктів на переходах Т.
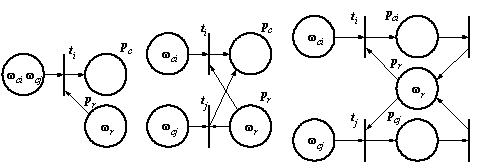
1. Конфлікт пов’язаних з доступом до спільного ресурсу pr заявок w ci, w cj:
а) К 1 - конфлікт заявок від операції за виконання наступної спільної операції (рис. 4.1, а), де
 ;
;  ;
;  ;
;
б) К 2 - конфлікт заявок від різних операцій за виконання спільної операції pc (рис. 4.1, б), де
 ;
;  ;
;  ;
;
в) K 3 - конфлікт заявок за спільний ресурс pr (рис. 4.1, в), де
 ;
;  ;
;
 .
.
2. K 4 - конфлікт різноманітних ресурсів pri, prj за заявку w ci від спільної операції pс (рис. 4.2, а), де
 ;
;
 .
.
3. К 5 - конфлікт незалежно виконуваних заявок w ci, w cj (рис. 4.2, б), де
 ;
; 
 .
.
а) б) в)
Рис. 4.1. Сіткове подання конфліктів заявок:
а, б – види конфліктів заявок за виконання спільної операції;
в – конфлікт заявок за загальний ресурс
Розгляд як конфлікту незалежно виконуваних заявок пов’язано з орієнтацією сіткової моделі на опис паралельно здійснюваних підпроцесів в умовах послідовного прийняття керуючих рішень.
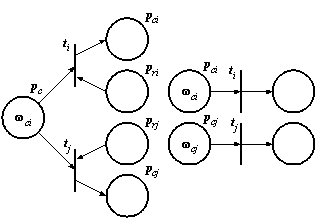
а) б)
Рис. 4.2. Сіткове подання конфлікту:
а – устаткування за обслуговування заявки;
б – незалежно виконуваних операцій
Для вирішення конфліктів першого виду встановлюються пріоритети заявок, що надходять у кожному конкретному випадку, на обслуговування PN 1: D ® {1, 2, 3, …} на базі правил переваги, які застосовувалися у розрахунку розкладу роботи технологічного устаткуванні при оперативному плануванні.
Тоді процедура вибору Rl,  активізованої операції, яка входить у конфлікт K l першого виду, сформується на базі наступних співвідношень:
активізованої операції, яка входить у конфлікт K l першого виду, сформується на базі наступних співвідношень:

 ;
;

 .
.
Для вирішення конфлікту другого виду K 4 встановлюються пріоритети на порядок надання устаткування PN 2: М ® {1, 2, 3, …} на базі стратегій транспортного обслуговування, визначенних при оперативно-диспетчерському управлінні:
а) заявка направляється на найближчий за часом доставки вільний ГВМ;
б) заявка направляється на вільний ГВМ із мінімальним поточним завантаженням;
в) вибір вільного ГВМ здійснюється випадковим чином.
Процедура вибору R 4 активізованої операції, що входить у конфлікт K 4 другого виду, сформується на базі наступного співвідношення:

 .
.
Конфлікт K 5 третього виду вирішується призначенням пріоритетів PN 3: О ® {1, 2, 3, …}, виходячи з прийнятого першочергового порядку виконання незалежно активізованих операцій і підпроцесів у ВП. Процедура вибору R 5 активізованої операції, що входить у конфлікт K 5 третього виду, сформується на базі наступних співвідношень:


 .
.
Враховуючи, що будь-якій перехід сіткової моделі може одночасно належати декільком різним типовим конфліктам, відображення h на підмножині переходів представляє собою сукупність предикатів PR умов спрацьовування, співвідношення яких формується на базі ієрархічної системи вирішення типових конфліктів (“вибір заявки обслуговування”–“надання ресурсу заявці”–“вибір порядку виконання незалежних заявок”). Іншими словами, на кожному рівні ієрархії типових конфліктів формується значення локального предикату умови спрацьовування переходу із врахуванням результатів вирішення на попередньому рівні. Тоді переходу  сіткової моделі можна поставити у відповідність узагальнений предикат умови спрацьовування наступного виду:
сіткової моделі можна поставити у відповідність узагальнений предикат умови спрацьовування наступного виду:
 ,
,
де  – перехід-зв’язка;
– перехід-зв’язка;
 – логічна умова того, що перехід
– логічна умова того, що перехід  входить до конфлікту l -го виду;
входить до конфлікту l -го виду;
 – локальний предикат умови спрацьовування переходу за розподілом
– локальний предикат умови спрацьовування переходу за розподілом  в ієрархічній системі вирішення конфлікту l -го виду,
в ієрархічній системі вирішення конфлікту l -го виду,  ;
;
 – логічна умова того, що перехід ініційований за розподілом ;
– логічна умова того, що перехід ініційований за розподілом ;
 .
.
Визначення 4.2. Сітковою моделлю управляючого процесу називається предикатна ІКСП наступного виду:
N у = (N П, PR),
де  – множина предикатів умов спрацьовування переходів.
– множина предикатів умов спрацьовування переходів.
При формалізації і побудові сіткових моделей АУ на основі управляючого процесу (УП) необхідно забезпечити асинхронне узгодження взаємодій між операторами управління так, щоб моменти ініціації виробничих операцій визначалися тільки готовністю необхідних даних про стан ОУ. У цьому випадку управляюча підсистема ГВС формує управляючі впливи уi у вигляді команд активізації виконання відповідних виробничих операцій в ОУ, після чого ОУ працює автономно, а управляюча підсистема очікує сигналу xi від ОУ про закінчення виконання цих операцій. Тоді кожен оператор-дія, який виконує процедуру по управлінню деякою виробничою операцією визначеної тривалості, у моделі ВП заміняємо сітковим фрагментом, зображеним на рис. 4.3, де wi, ui – зовнішні позиції, що відображають відповідно видачу управляючого впливу і прийом сигналу про стан устаткування. Таким чином, для опису АУ на базі моделі УП N у введемо спеціальні множини позицій, що представляють деякий вхідний і вихідний алфавіти, які характеризують асинхронні взаємодії з ОУ.

Рис. 4.3. Сіткове подання процедури управління виробничою операцією
Визначення 4.3. Сітковою моделлю алгоритму управління називається навантажена предикатна ІКСП, яка задається набором наступного виду:
N А = (N у, X, Y, V, W, f, j),
де  – множина сигналів про стан устаткування;
– множина сигналів про стан устаткування;
bi – логічні змінні, що відповідно вказують ознаку стану ОУ: несправність, зайнятість, налагодженість і робота;
 – множина управляючих впливів; par 1, par 2 – управляючі параметри: адреса відправлення, номер програми обробки;
– множина управляючих впливів; par 1, par 2 – управляючі параметри: адреса відправлення, номер програми обробки;
 ;
;
 – множини зовнішніх позицій для подання асинхронної взаємодії з ОУ;
– множини зовнішніх позицій для подання асинхронної взаємодії з ОУ;
 ;
;  - функції навантаження на зовніші позиції.
- функції навантаження на зовніші позиції.
Згідно з принципом подійності управління, момент часу управління відповідає моменту надходження сигналу про готовність устаткування xi (розміщення в позиції ui мітки-сигналу). Тоді задача управління за сітковою моделлю полягає у виборі в цей момент однієї з множини готових до виконання операцій (вибрати за істинним значенням предиката prj відповідний перехід спрацьовування) і вказівки шляху її реалізації у заданні управляючого впливу yi (помістити в позицію wi мітку управління). Множина предикатів сіткової моделі N А формалізує стратегію управління ГВС.
Таким чином, метод синтезу сіткових моделей коректних алгоритмів управління на основі отриманого і перевіреного опису ВП можна представити у вигляді послідовності наступних етапів:
– сформувати структуру УП і визначити склад необхідних операторів управління операціями ВП;
– усунути всі конфлікти через наявність спільних ресурсів та альтернативний характер ВП за допомогою предикатів умов спрацьовування переходів;
– вибрати всі оператори-дії, для яких сформувати набори управляючих впливів і сигналів про стан відповідного устаткування;
– сформувати для кожної оператора-дії сіткове подання асинхронної взаємодії з виробничим устаткуванням.
У кожному конкретному випадку правила призначення пріоритетів при формуванні множини предикатів обираються за результатами імітаційних експериментів над сітковою моделлю ВП і порівнянням їх за обраним критерієм. Використання ж правил переваги допускає ефективну організацію управління по ситуаціях при прямій диспетчеризації функціонування ГВС.
|
|