Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Задание № 1
|
|
Расчётная работа №2
по дисциплине «Теория автоматического управления»
Синтез линейных систем
Вариант № 4
| Студент: Группа: | Иванов Ф.А. ММ-320502 |
| Преподаватель: | Сусенко О.С. |
Екатеринбург
Даны уравнения математической модели объекта управления.
Во всех вариантах:
 – управляющее воздействие на объект управления,
– управляющее воздействие на объект управления,
 – главная регулируемая величина,
– главная регулируемая величина,
 – внутренние величины объекта управления.
– внутренние величины объекта управления.
Штрих обозначает производную по времени.
Задание № 1
Разработать трёхконтурную систему автоматического регулирования с главным контуром регулирования величины z и подчинёнными контурами регулирования величин y и x.
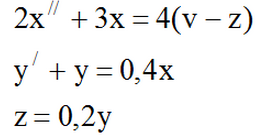
Выполним преобразование Лапласа:
2p2x(p)+3x(p)=4v(p)-4z(p)
Py(p)+y(p)=0.4x(p)
Z(p)=0.2y(p)

Получаем модель объекта:
 рис. 1 – внутренняя система
рис. 1 – внутренняя система

рис. 2 – график
Произведём синтез регуляторов:
Определим базовые постоянные для системы 3-го порядка, при распределении корней по Баттерворту:
tm = 1.5+0.2  =2.3
=2.3
T3 =  =
=  = 0.383
= 0.383
T1 =  =
=  = 0.1915
= 0.1915
1 контур:
Порядок контура принимаем равным номеру контура:

Желаемая передаточная функция 1-го контура (распределение корней по Баттерворту, ):
 ,
,
где  базовая постоянная времени первого контура.
базовая постоянная времени первого контура.
Желаемая передаточная функция 1-го контура в разомкнутом состоянии:

Передаточная функция регулятора 1-го контура

Wk1 =  =
=  ,
, 
Wk1 =  2.61p
2.61p  (ИД-регулятор)
(ИД-регулятор)
2 контур:
Порядок второго контура  .
.
Желаемая передаточная функция 2-го контура (распределение корней по Баттерворту, n=2):
 ,
,
где  базовая постоянная времени второго контура.
базовая постоянная времени второго контура.
Желаемая передаточная функция 2-го контура в разомкнутом состоянии:

Примем соотношение базовых постоянных первого и второго контуров.

Как будет показано ниже, такое соотношение позволит существенно упростить передаточную функцию регулятора. Подставляем  .
.

Таким образом, передаточная функция первого контура является частью желаемой передаточной функции второго контура в разомкнутом состоянии. Регулятор 2-го контура в этом случае не должен компенсировать передаточную функцию 1-го контура.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
Передаточная функция регулятора 2-го контура:

Wk2 =  =
=  ,
, 
Wk2 =  =
=  =
=  + 6.53 (ИД- регулятор)
+ 6.53 (ИД- регулятор)
3 контур:
Порядок 3-го контура  .
.
Желаемая передаточная функция 3-го контура (распределение корней по Баттерворту, ):
 ,
,
где  базовая постоянная времени 3-го контура.
базовая постоянная времени 3-го контура.
Желаемая передаточная функция 3-го контура в разомкнутом состоянии:

Примем отношение базовых постоянных 3-го и 2-го контуров равным.

Подставляем Т3=2Т1 в желаемую передаточную функцию разомкнутого 3-го контура.

Таким образом, передаточная функция 2-го контура является частью желаемой передаточной функции 3-го контура в разомкнутом состоянии. Регулятор 3-го контура в этом случае не должен компенсировать передаточную функцию 2-го контура.
Передаточная функция регулятора 3-го контура:

Wk3 =  =
=  ,
,
Wk3 =  =
=  (И- регулятор)
(И- регулятор)
Компенсацию внутренней обратной связи объекта управления выполним путем введения дополнительного воздействия на вход первого контура. Найдем компенсацию обратной связи объекта:
Wk4 =  (П-регулятор)
(П-регулятор)

Рис.3-модель трёхконтурной системы
· Подключил на вход системы единичный скачок задания величины z.
· Подключил на выход системы осциллограф регистрирующий процесс z(t) (рис.3).
· Установил время моделирования несколько больше, чем ожидаемое время переходного процесса.
· Установил максимальный шаг расчёта 0, 01.
· Запустить моделирование
· Определил установившееся значение величины z (равное 1)
Проверка результатов работы в Matlab-Simulink
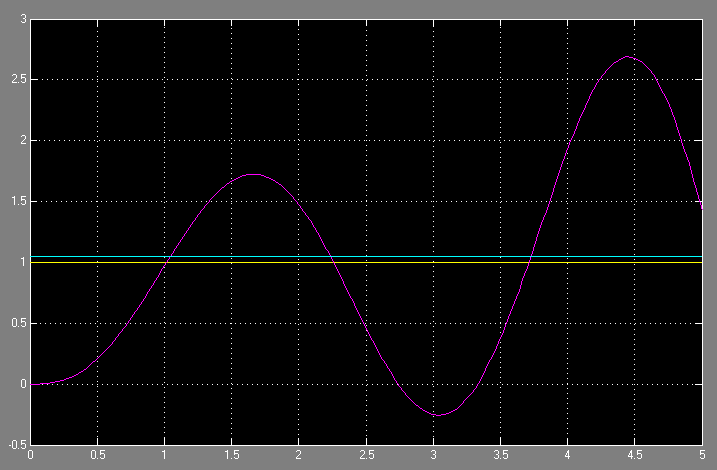
Перерегулирование равно примерно 10 %.
Время переходного процесса (около 2, 3 сек, как и было задано)
|
|