Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

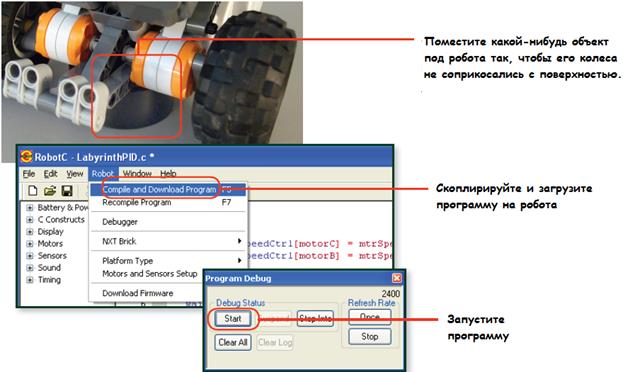
Скачайте и запустите.
|
|
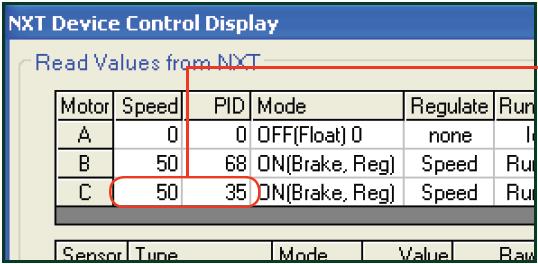
4. Должно появиться окно " NXT Device Control Display". Если оно не появляется...
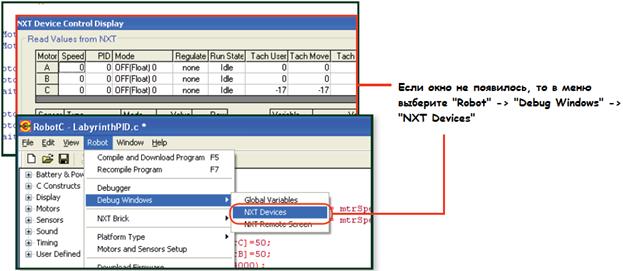
В этом окне располагается отладчик устранения неисправностей, который может помочь вам узнать, что ваш робот делает и «думает». Но здесь нас интересуют только: " Скорость" и " PID" для двигателей C и B.
Колонка скоростей показывает нужную скорость для двигателя, которую мы устанавливаем на 50%. PID колонка показывает фактическое количество энергии, что робот дает двигателю, чтобы заставить его двигаться на такой скорости.
5. Зафиксируйте одно колесо и наблюдайте за значением мощности на соответствующем двигателе.

6. Отпустите колесо и наблюдайте его реакцию.
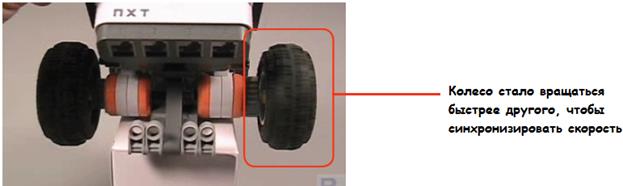
ПИД-регулирование является отличным способом, чтобы сделать движение вашего робота более последовательным. Алгоритм отслеживает, насколько быстро двигатели вращаются, и как они вращаются на самом деле, и регулирует уровень мощности двигателей, чтобы синхронизировать их. Это позволяет роботу автоматически подстраиваться под изменения, как в окружающей среде, так и в двигателях.
|
|