Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Глубинный вибратор. Основные параметры, устройство и принцип действия.
|
|
Глубинные вибраторы имеют рабочий орган в виде цилиндрического вибронаконечника, погружаемого в уплотняемую смесь. Такие вибраторы применяют для уплотнения бетонных смесей при укладке их в монолитные неармированные бетонные и железобетонные конструкции с различной степенью армирования (фундаменты, стены, колонны, сваи, балки и др.), а также при изготовлении крупных бетонных и железобетонных изделий для сборного строительства.
Наружный диаметр и длину вибронаконечника вибраторов подбирают таким, чтобы обеспечить ему беспрепятственное движение в зазорах между арматурой. Глубинные вибраторы выпускают с электрическим и пневматическим приводами. Они могут быть ручными (обслуживаются оператором) и навесными (подвешиваются на крюк гидроподъемного устройства).
Вибровозбудитель электрических глубинных вибраторов может приводиться в действие через гибкий вал от переносного и располагаемого на поверхности электропривода (вибраторы с гибким валом) или от встроенного в вибронаконечник электрического или пневматического двигателя (вибраторы со встроенным двигателем). Глубинные вибраторы имеют дебалансные и фрикционно-планетарные вибровозбудители.
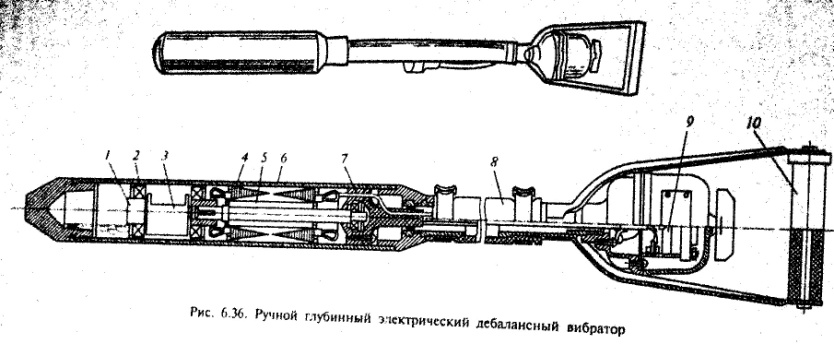
Глубинные ручные дебалансные вибраторы со встроенным электроприводом (рис. 6.36) имеют единую конструктивную схему. Дебалансный вибровозбудитель представляет собой герметически закрытый стальной цилиндрический корпус 6, в который встроены высокочастотный трехфазный асинхронный электродвигатель 4 с короткозамкнутым ротором 5 и полый дебалансный вал 1 с дебалансом 3, вращающийся в двух подшипниках качения 2. Подшипники смазываются жидкой смазкой, поступающей через полый дебалансный вал из нижней полости наконечника. В корпус встроен подшипниковый узел 7, на который опирается консоль вала ротора. Вращающийся дебаланс создает непрерывно меняющую свое направление вынуждающую силу, благодаря чему вибронаконечник совершает круговые колебания, которые передаются уплотняемой смеси. Частота колебаний вибронаконечника равна частоте вращения электродвигателя. Вибронаконечник соединен с рукоятью 10 оператора виброизолирующим резинотканевым рукавом 8 или металлической штангой, внутри которых проходит питающий кабель электродвигателя. В рукоять вмонтирован пакетный выключатель 9 для включения и выключения электродвигателя вибратора. Электродвигатели вибраторов работают на токе повышенной частоты (200 Гц) при напряжении 36...42 В и подключаются к внешней электросети через преобразователь частоты.
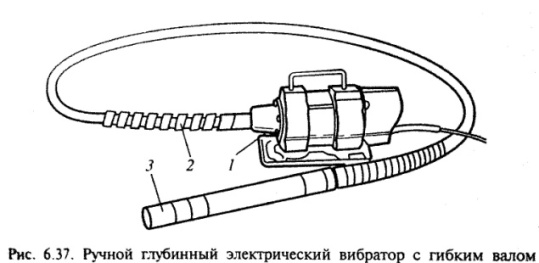 Глубинные ручные электрические вибраторы с гибким валом (рис. 6.37) однотипны по конструкции и состоят из переносного электродвигателя 1 с рукояткой для переноса и выключателем сменного вибронаконечника 3 с планетарным механизмом возбуждения колебаний и гибкого вала 2 для передачи крутящего момента от электродвигателя к шпинделю вибронаконечника. Такие вибраторы характеризуются повышенной частотой колебаний (167...334 Гц), малыми размерами наконечника (диаметр 51...76 мм, длина 420...430 мм) и применяются для уплотнения бетонных смесей с мелким заполнителем при изготовлении густо- и среднеармированных железобетонных конструкций и изделий. Вибронаконечники вибраторов с гибким валом могут работать в вертикальном или наклонном положении.
Глубинные ручные электрические вибраторы с гибким валом (рис. 6.37) однотипны по конструкции и состоят из переносного электродвигателя 1 с рукояткой для переноса и выключателем сменного вибронаконечника 3 с планетарным механизмом возбуждения колебаний и гибкого вала 2 для передачи крутящего момента от электродвигателя к шпинделю вибронаконечника. Такие вибраторы характеризуются повышенной частотой колебаний (167...334 Гц), малыми размерами наконечника (диаметр 51...76 мм, длина 420...430 мм) и применяются для уплотнения бетонных смесей с мелким заполнителем при изготовлении густо- и среднеармированных железобетонных конструкций и изделий. Вибронаконечники вибраторов с гибким валом могут работать в вертикальном или наклонном положении.
Вибронаконечник (рис. 6.24) состоит из корпуса 4, шпинделя 1, опирающегося на шарикоподшипники, дебаланса-бегунка 5 и упругой муфты 2, позволяющей бегунку-дебалансу отклоняться от оси вращения шпинделя на расчетный угол. Колебания корпуса вибронаконечника создаются бегунком-дебалансом, планетарно обкатывающимся по конусной поверхности неподвижной втулки или сердечника 6, жестко соединенных с корпусом. Бегунок-дебаланс При пуске вибратора бегунок-дебаланс сначала вращается в воздухе, а затем под действием центробежной силы начинает отклоняться от геометрической оси вибронаконечника на угол до 5° и наносить удары по втулке или пальцу, возбуждая колебания корпуса наконечника. Соответствующим подбором соотношения диаметров втулки и бегунка-дебаланса можно получать высокую частоту коле- баний корпуса вибратора при сравнительно небольшой частоте вращения вала электродвигателя.
Частота колебаний вибронаконечника пв (Гц) зависит от угловой скорости планетарного движения бегунка-дебаланса.
При внутренней обкатке бегунка-дебаланса
nв = nш /(1 – D/d), при внешней обкатке nв = nш /(D/d- 1),
где nш — частота вращения шпинделя (вала), с-1; D — диаметр втулки или пальца, мм; d — диаметр бегунка-дебаланса, мм.
Вынуждающая сила, развиваемая бегунком-дебалансом при его вращении (Н),
F=mw2R, (6.13)
где т — масса бегунка-дебаланса, кг; w — угловая скорость центра масс бегунка-дебаланса, рад/с; R — расстояние от центра тяжести бегунка-дебаланса до оси втулки или пальца, м.
Статический момент массы бегунка-дебаланса (кг-м)
M = mR,, (6.14)
Вращение шпинделю с дебалансом сообщается от переносного электродвигателя через гибкий вал правого вращения (во избежание его раскручивания) диаметром 8... 12 мм, заключенный в защитный резинрметаллический шланг-броню. За гибкий вал вибратор удерживается при работе. На обоих концах гибкого вала имеются наконечники для присоединения к валу электродвигателя и шпинделю вибронаконечника. В качестве привода планетарных вибраторов используют асинхронные электродвигатели с короткозамкнутым ротором, работающие на токе нормальной частоты (50 Гц) при напряжении 36...42 В и подключаемые к внешней электросети через понижающий трансформатор. Электродвигатели монтируют на корытообразной подставке, позволяющей устанавливать привод на свежеуложенную смесь.
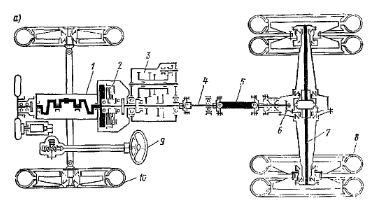
18.Как устроен автомобиль (привести общую кинематическую схему).Как осуществляется тяговый расчет транспортного средства?
20. Какими способами может осуществляться поворот строительной машины? Как рассчитать радиус поворота 2-х осной машины с управляемыми передними колесами?
Поскольку орган управления — рулевое колесо — постоянно находится в руках водителя, оно на современных автомобилях выполняет также информационную функцию — по усилиям, вибрациям на рулевом колесе происходит передача водителю информации о состоянии дорожного покрытия, нагруженности контакта колес с дорогой.
Рулевое управление автомобиля должно обеспечивать ощущаемую водителем связь между углом поворота рулевого колеса и направлением движения автомобиля, обладать высокой надежностью. Усилия, необходимые для управления, не должны приводить к повышенной утомляемости водителя и в тоже время должны информировать его о состоянии контакта управляемых колес с дорогой (обеспечивать «чувство дороги»). От рулевого управления зависит минимальный радиус поворота автомобиля на ограниченных площадях. Конструкция рулевого управления не должна передавать ударные нагрузки от неровностей дороги на руки водителя.
Все перечисленные выше требования учитываются при проектировании рулевого управления.
Изменить направление движения автомобиля можно двумя различными способами: за счет поворота колес или звеньев автомобиля в горизонтальной плоскости (кинематический способ) или за счет создания на колесах правого и левого борта различных по величине или по направлению продольных сил (силовой способ) (г).
Для управления большинством современных автомобилей применяется кинематический способ, который может быть реализован путем: — поворота управляемой оси (а);
— поворота управляемых колес (б);
— поворота сочлененных звеньев (складывания рамы) (в).
Поворот управляемой оси — это наиболее старый из известных способов управления. Он применялся еще на двухосных гужевых повозках. При таком способе ось с колесами поворачивалась относительно шкворня, установленного в центре повозки. Система управления получалась очень простой, но требовала сильного сужения передней части кузова для перекатывания управляемых колес, не обеспечивала демпфирования ударов от неровностей дороги на органы управления и при предельных углах поворота оси возникала опасность бокового опрокидывания из-за уменьшения площади опоры автомобиля.
Для частичного устранения указанных недостатков пытались заменить управляемую ось одним колесом, установленным по центру автомобиля (например, автомобиль К. Бенца). В настоящее время такая схема поворота осталась на двух- и трехколесных транспортных средствах. Поворот управляемой оси сегодня применяется только на прицепах.
Принцип управления за счет поворота сочлененных звеньев применяется в случае, когда колеса транспортного средства имеют большие размеры и поворот каждого из них затруднен. Несущая система транспортного средства состоит из двух частей, к каждой из которой присоединена передняя и задняя оси. Обе части соединены друг с другом подвижно с помощью вертикального шкворня. Относительный поворот частей («складывание» рамы или иной несущей системы) происходит с помощью гидравлических цилиндров рулевого управления. К недостаткам данной схемы относится низкая точность управления при высокой скорости, трудность размещения кузовов или кабин на двух подвижных частях рамы, усложнение трансмиссии. В связи с этим данный способ рулевого управления на современных автомобилях применяется редко, основная сфера использования — тихоходные тракторы, дорожно-строительные машины, специальные вездеходы и т. п.
Наибольшее распространение в конструкции автомобиля получило рулевое управление с поворотными колесами. В этом случае каждое управляемое колесо может поворачиваться в горизонтальной плоскости относительно собственной оси поворота. Для синхронизации поворота правого и левого колеса одной оси они связаны шарнирным механизмом — рулевой трапецией.
Рулевая трапеция обеспечивает поворот правого и левого колес на разные углы, что позволяет им катиться на повороте по разным радиусам без проскальзывания.
Основные преимущества указанной схемы поворота: колеса занимают при поворотах небольшой объем внутри кузова, что позволяет удобно размещать над управляемым мостом другие агрегаты автомобиля (двигатель, трансмиссию и т. д.); для поворота колес требуются незначительные усилия, близкое расположение колеса к оси его поворота уменьшает удары, передающиеся от дороги на рулевое управление.
Двухосный автомобиль имеет, как правило, одну переднюю ось с управляемыми колесами. Иногда для улучшения маневренности такие автомобили снабжают всеми управляемыми колесами, но при этом усложняется конструкция рулевого управления и возникают проблемы с управляемостью на высокой скорости. Поэтому на автотранспортных средствах с передними и задними управляемыми колесами при движении с высокими скоростями принудительное управление задними колесами отключают, а колеса фиксируются в нейтральном положении.
Для современных скоростных легковых автомобилей конструкция подвески задних неуправляемых колес и наличие упругих резинометаллических шарниров крепления рычагов к несущей системе (эластокинематика подвески) обеспечивает при движении на повороте незначительные углы поворота колес из-за крена кузова и действия на колеса боковых сил. Это явление называется «доворотом» неуправляемых колес и при правильно спроектированной подвеске позволяет улучшить управляемость в скоростных поворотах.
Одну ось с управляемыми колесами могут иметь и трехосные автомобили, но при условии, что вторая и третья неуправляемые оси сближены. Если эти оси разнесены или автомобиль имеет более трех осей, то для предотвращения бокового проскальзывания колес применяют несколько осей с управляемыми колесами.
При этом водитель непосредственно поворачивает колеса первой оси, колеса прочих осей связаны с первой осью с помощью механических, гидравлических или электрогидравлических передач, которые управляют их поворотом. Управляемые колеса полуприцепов могут поворачиваться в зависимости от угла складывания между автомобилем-тягачом и полуприцепом или двумя частями сочлененных автобусов.
|
|