Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Рабочие характеристики трансформатора.
|
|

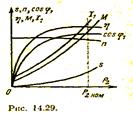
Из рабочих характеристик видно, что трансформатор не выгодно эксплуатировать с недогрузкой, когда I2 < I2Н, т.к. при этом КПД и cos φ, имеют низкие значения. Зависимость U2 =f(I2) называется внешней характеристикой трансформатора. Из этой характеристики видно, что U2 с ростом I2 меняется незначительно, не более чем на 5-10%, т.е. трансформатор обеспечивает высокое качество электроэнергии. Ток I1 с ростом I2 меняется практически пропорционально I2.
25Трехфазные трансформаторы. Трансформатор – это статическое электромагнитное устройство, для преобразования электроэнергии переменного тока одного напряжения в энергию переменного тока другого напряжения при одной и той же частоте. Трансформирование энергии в 3-ехфазной цепи можно осуществлять тремя однофазными трансформаторами или спец-ым трехфазным трансформатором. Группу однофазных трансформаторов применяют при очень больших мощностях в связи с простотой их трансформации от завода изготовителя. Поэтому чаще применяют трехф-ые транс-ры, т.к. они дешевле и имеют меньшие габариты. Трехфазный трансформатор состоит из сердечника набранного из тонких изолированных листов электротехнической стали, а также трех первичных и вторичных обмоток. АВС – начальные фазы обмоток высшего напряжения, ХУZ – их концы, аbc-начальные фазы обмоток низшего напряжения xyz- их концы.
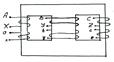
Эти обмотки могут соединятся по схеме звезда и по схеме треугольник. Группа соединения обмоток указывает на то, что угол сдвига фаз между соответствующими первичными и вторичными напряжениями трансформатора равен часовой и минутной стрелкой в часах, при этом вектор линейного напряжения первичной обмотки соединяется с минутной стрелкой.

Группу соединения обмоток трехфазного трансформатора важно знать т.к. на параллельную работу можно включить только трансформаторы имеющие одноименную группу. На параллельную работу трансформаторы устанавливают когда Векторная диаграмма трехф-ого трансф-ра в режиме холостого хода на рис.10.13.

Фазные напряжения питающей сети и фазные ЭДС сдвинуты на угол 120°. Векторы магнитных потоков в трех стержнях образуют симметричную звезду, и сумма их = 0. Поэтому силовой трансф-тор не имеет четвертого замыкающего стержня.
26. Измерительные трансформаторы. В цепях переменного тока часто применяют измерительные трансформаторы напряжения и тока, с помощью которых измеряют большие напряжения и токи с помощью приборов, рассчитанных на измерение небольших значений этих величин. Кроме того, измерительные трансформаторы позволяют изолировать электроизмерительные приборы цепи от высокого напряжения и тем самым обеспечить безопасность работы обслуживающего персонала.
Трансформаторы напряжения служат для подключения вольтметров, катушек напряжения ваттметров, счетчиков, фазометров и реле, рассчитанных на работу со стандартными приборами напряжением 100 В; их выпускают на различные значения первичного напряжения, достигающего десятков киловольт. Трансформаторы тока используют для включения амперметров, токовых катушек ваттметров, счетчиков и т. д., рассчитанных на работу со стандартными приборами на ток 1, 2, 3, 5; 5 А.
27. Асинхронные машины. Устройство и принцип работы трехф-го асинхронного двигателя. Асинхр-ая машина - машина переем-го тока, в кот-ой частота вращающего магнит-го поля статора не равна частоте вращающегося ротора. Они как и другие эл. машины работают в обратимом режиме, т.е. могут работать как в режиме двигателя, так и в режиме генератора. Как генер. Асинхр-ые машины уступают синхронным машинам, поэтому основной их режим работы-двигательный режим. Асинхр-ые машины явл. самыми распростр-ми в пром-ти в силу их простоты, надежности и дешевизны. Асинхр. Двигатели бывают одно-2-ух и 3-ехфазными. Устройство 3-ехфазного асинхр-го двигателя. Состоит из 2-ух осн. частей: неподвижного статора и вращающегося ротора. Статор -полый цилиндр набранный из таких листов эл.техн-ой стали, изолиров. друг от друга для уменьшения потерь на гистерезисе или кривые токи. На внутр. пов-ти статора им-ся пазы, в кот. уклад-ся 3-ехфазная обмотка. Обмотка статора - совок-ть 3-ех одинаковых однофазных обмоток (фаз сдвинутых относ-но др. др. на угол 120°). Обмотка соединения по схеме «звезда» и «треуг-к» в завис-ти от питающего напряж. Если есть надпись Υ / 380/220 – обозн-ет, что при лин-м напряжении =380В обмотки статора соед-ся по схеме Y, а при напр. = 220В по схеме ∆. Ротор - соединяет сердечник, набранный из неизолированных листов эл.технич-ой стали. На наруж. пов-ти ротора имеются пазы, в кот. размещ. ротериальная обмотка. По конструкции роторной обмотки асинхр-ые двигатели бывают с короткозамкнутым ротором и фазным ротором. Обмотка предст-ет собой совок-ть уложенных в пазы сердечника провод-в из Aℓ, Cu или бронзы. По внешнему виду короткозамкнутая обмотка предст. собой беличью клетку. В асинхр. двигателе с фазным ротором обмотка ротора вып-ся по типу статерной, концы обмотки соед. по схеме Y. Свободн. выводы обмоток присоеденены к 3-ем устан-ам на вал и изолиров. как от вала, так и от сердечника кольцами, по кот. скользят щетки. Асинхр. двиг-ли с фазным двигателем исп-ют в основном в под. кранах. Асинхр. двигат. с короткозамкн. ротором исп-ют в вентил-х, насосах, транспортерах. Принцип д-вия асинхр-го двигателя. Основан на взаимод-вии вращ-ся магн. поля, созд-ого статерной обмоткой, с токами наводимыми этим полем в обмотках ротора. Токи в обмотке = 0 по величине и сдвинуты друг относит-но друга на угол 120°. Можно сказать, что магн. поле в зазоре м/у статером и ротером явл. вращ. магнитным полем. Частота вращ. магн. поля: n1=(60 f1)/p, где n1 –частота статора, f1 – частота питающей сети, р –число пар полюсов. Основная схема включ. асинхр. двигателя: если возникает необ-ть изм-ть напр-ние вращ. ротера, то в этом случае достат-но поменять местами любые 2 фазы.

Статор в виде пост-ого магнита:

Основной магн. поток Ø направлен от N к S и пересекает проводник обмотки ротера. При этом он наводит ЭДС e2. Направл-е ЭДС опр-ся по правилу правой руки: правую руку расп-ют так, чтобы силовые линии магнит. поля входили в ладонь, тогда большой палец будет направлен по направл. перемещ. проводника (в нашем случае в сторону против-но направл. вращ. магн. поля). 4 пальца укажут направление e 2 (в нашем случае от нас). Если обм. ротора замкнута, то в ее пров-ках возникает ток i2 соноправленный с e2. В рез-те взаимного тока i2 и магн. потока Ø возн-ет сила F и мом. вращения М под действием кот. ротор начинает вращ-ся. Направление силы F опр-ся по правилу левой руки: ладонь левой руки надо распр-ть так, чтобы силовые линии входили в ладонь. 4 вытянутых пальца расположить по направлению тока, тогда большой палец укажет направление силы F. Ротор начинает вращаться с частотой n2 > n1. По мере разгона двигателя e2 уменьш ся, т. к. уменьш-ся разница (n2- n1). n1 –частота вращения статора, n2 –частота вращения ротера. Ток i2 тоже уменьш-ся, вместе с ним уменьш-ся вращ. момент М, частота ротера увелич-ся до тех пор, пока не наступит равновесие м/у вращ. моментом М и мом. сопротивления Мсопр. После этогоротер будет вр-ся с частотой n2. М=Мсопр; (n1- n2)/ n1 = S, S-скольжение. Если n2=0, то S=1. Если n2= n1, то S =0. Величина скольжения колеблится в пределах 2-7%.
28 Рабочие характеристики асинхронного двигателя. Механические характеристики наглядно показывает свойства асинхронного двигателя как части электропривода. Но для более полного выявления свойств самого двигате5ля служат его рабочие характеристики – так принято называть зависимости от полезной мощности Р2 двигателя на валу частоты вращения n, вращающего момента М, коэффициента мощности коэффициента cosφ и КПД  . Все рабочие характеристики снимаются при номинальных частоте сети f и напряжении между выводами статора U1=U1ном. Вращающий момент складывается из полезного момента М2 и момента холостого хода Мх М2=Р2/ω р(угловая скорость двигателя).
. Все рабочие характеристики снимаются при номинальных частоте сети f и напряжении между выводами статора U1=U1ном. Вращающий момент складывается из полезного момента М2 и момента холостого хода Мх М2=Р2/ω р(угловая скорость двигателя).
Что касается зависимости cosφ 1 двигателя от нагрузки, то его изменения обусловлены следующими соотношениями. Намагничивающий ток двигателя мало зависит от нагрузки, так как ее увеличение вызывает лишь возрастание потокосцеплений рассеяния, пропорциональных токам в обмотках статора и ротора, а главный магнитный поток машины при возрастании нагрузки незначительно уменьшается. Но активный ток двигателя пропорционален его механической нагрузке. Таким образом, с увеличением нагрузки двигателя относительное значение реактивного тока быстро убывает, a cos ф1 увеличивается. При холостом ходе двигателя его коэффициент мощности довольно низок — примерно 0, 2. С увеличением нагрузки он быстро возрастает и достигает максимального значения (0, 7—0, 9) при нагрузке, близкой к номинальной. Таким образом, даже у полностью загруженного двигателя реактивный ток составляет 70—40 % тока статора.
Неполная загруженность асинхронных двигателей является одной 'из главных причин низкого cosφ промышленных предприятий. Естественным способом повышения cosφ является полная загрузка асинхронных двигателей. Главный магнитный поток двигателя пропорционален напряжению на статоре. Намагничивающий ток, возбуждающий этот поток, при заданном значении потока обратно пропорционален магнитному сопротивлению на пути потока. В этом магнитном сопротивлении большую часть составляет сопротивление воздушного зазора между статором и ротором. По этой причине конструктор стремится сократить этот зазор до минимума, определяемого условиями подвижности в подшипниках и необходимым запасом на их износ, прогибом вала и точностью центровки. С увеличением номинальной мощности двигателя необходимый воздушный зазор возрастает значительно медленнее этой мощности, благодаря чему с повышением номинальной мощности двигателя его cosφ увеличивается. С уменьшением номинальной частоты вращения двигателя увеличивается его магнитный поток, так как при меньшей частоте вращения он индуктирует в фазной обмотке статора меньшую ЭДС. Следовательно, у тихоходных двигателей намагничивающий ток относительно больше, a cosφ существенно меньше.
Коэффициент полезного действия определяется отношением полезной мощности на валу Р2 к мощности Р1( определяющей потребление двигателем энергии из сети:

Мощность Р1 равна сумме полезной мощности и мощности всех потерь в двигателе:

Мощность всех потерь энергии в двигателе можно разделить на постоянную составляющую, практически не зависящую от нагрузки, и переменную составляющую, зависящую от нее.
Мощностью постоянных потерь энергии в двигателе можно считать мощность потерь в сердечнике статора на гистерезис и вихревые токи и мощность механических потерь, которая определяется экспериментально из опыта холостого хода двигателя.
Мощностью переменных потерь энергии в двигателе является мощность потерь на нагревание проводников обмоток статора и ротора, она равна:

Своего максимального значения (65—95 %) КПД достигает, когда переменные потери равны постоянным (см. § 8.9). У большинства двигателей этот максимум КПД имеет место примерно при нагрузке, равной 75 % номинальной, так как двигатели проектируются с учетом того обстоятельства, что далеко не всегда они полностью загружены.
29.Схемы замещения фазы асинхр-го двигателя. По аналогии с трансф-ом можно составить Т-образную и Г-образную схемы замещения.
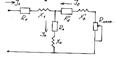
Rн=((1-S)/S)R`2. R1-акт. сопр. обмотки статора; Х1-индуктивное сопр-ние обмотки статора; R`2 – привед. акт. сопрот. обмотки ротера; Х`2-прив. индукт. сопр. обмотки ротера; R0, X0-акт. и индукт. сопротивл. статора в режиме хол-го хода. ((1-S)/S)R`2-акт. сопр., имитир-щее механич-ую нагрузку на валу двигателя.

Rk=R1+R`2 Xk=X1+X`2, Rk, Xk- опред-ся из опыта короткого замыкания.
30 Способы пуска асинхронного двигателя с короткозамкнутым ротером.Пусковые двигатели тем лучше, чем больше пусковой момент и меньше пусковой ток. Mпуск и I пуск
1 сп-б пуска: Прямой пуск двигателя.

К- ключ (магнитный пускатель)
Iпуск=(5 до 7)Iном Кпуск=Iпуск/Iном=5 до7 Достоинство
: 1-двиг-ль развивает наибольший пусковой момент 2-простота схемы
пуска двиг-ля. Недостатки: 1- Пусковой ток превышает номинальное
зн-ие в 5-7 раз.
2 сп-б пуска: Пуск через мунтирующий реакторы.

Последовательность пуска- 1- сраб-т клюя К1, в следствии этого напряж. Поступает на статор обмотки через катушку реактора. Часть падения напряж-я (фазного напр-я) происх-т на этих катушках. Uпуск падает стремится к раз падает Iпуск. 2-при наборе ротером в двигателе номин-х оборотов ключ К1 отключ-я и включ-я К2. в этом случае статорные обмотки двиг-ля будут включены в сеть непосредственно. Дост-во-ток пусковой уменьш-я в К раз, нед-к-момент пуск. Уменьщ-я вК квадрат раз. 3- включение двиг-ля через понижающий автотрансформатор. Дост-ва и нед-ки аналог-ы второму. 4- пуск с переключением статерной обмотки двиг-ля с перекл-ем со сх. Треугольник на сх. Звезда.
практ-и все обмотки двиг-й изгот-ся
на номин-м напряжении 220 В, поэт.
Если Uл=220В, то
Uф=220/корень 3=127В
отнош-иепуск-го тока Iпуск треуг./ Iпуск звезда
=корень3

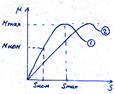
Пуск асинхронного двигателя с фазным ротером. Двигатель с фазным ротером обладает улучшенными пусковыми свойствами. Их включ-е осущ-ся подключ-и и ротером обм-м пуск-го реостата.

Sкр=R12+ R1п.р/Xк=1 (1) R12- активное сопрот-е обм-и ротера
R1п.р- сопр.пуск.реастата пересчит-е на статор-ю обмотку.
Xк=X1+X12- сумма инд-х сопрот. стат-й и рот-й обмоток.
При выпонении усл.(1) мом.
Мпуск=М max по мере
Разгона двиг-ля пуск.р.
плавно выв-ся и двиг-ль
будет работать по усл.(1).
|
|