Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Прямая многократная засечка. Постановка задачи. По левые работы.
|
|
Выполняется при наличии 3-ех исходных пунктов и 3-ех исходных сторон.
r = 3 - 2 = 1
 x = xp + δ x
x = xp + δ x
y = yp + δ y
δ x и δ y - поправки в приближенные значения.
 mβ = √ ∑ PVV/(n-k) - оценка точности полевых измерений
mβ = √ ∑ PVV/(n-k) - оценка точности полевых измерений
где V = Vβ i – поправка в измеренные углы
Р – вес результата измерений
 Мр = √ m2x + m2y
Мр = √ m2x + m2y
 mx = mβ /√ Px
mx = mβ /√ Px
my = mβ /√ Py
По заданной Мр не выполняя полевых измерений можно предрасчитать точность, выбрать средства измерений и разработать методику.
Обратная однократная засечка. Вывод формул вычисления координат пункта.
Дано:
xT1, yT1
xT2, yT2
xT3, yT3
Найти:
xp и yp
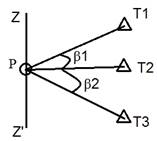
Пункт P закреплен таким образом, чтобы была видимость. Способом круговых приемов измеряются горизонтальные углы. На пункте Р устанавливается прибор.
Обратная геодезическая задача
(yT1 – yp) = (xT1 – xp)tgα 1
(yT2 – yp) = (xT2 – xp)tgα 2
(yT3 – yp) = (xT3 – xp)tgα 3
α, x, y – неизвестные.
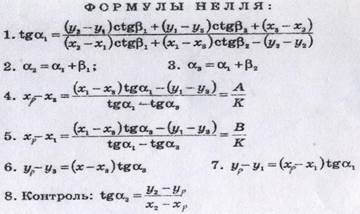
Раскрывая функцию tg как суммы 2-ух углов и выражая искомое неизвестное получаем:
Обратная однократная засечка. Оценка точности планового положения пункта.
Единственный контроль – графическое определение координат пункта Р.
М2р = 1/4F2 * (Ϭ 12 + Ϭ 22 + Ϭ 32)*m2u
Путем построения инвертного треугольника.
F – площадь треугольника.
Ϭ i – стороны треугольника.
mu – СКО измерения 1-ого направления.
Направление – угол, образованный нулевым диаметром лимба и следом коллимационной плоскости, образованном при визировании на цель.
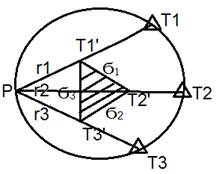
Опасный круг
PT2 = D
ri = ρ /Si – градиент направления
а = ρ /D
В этой ситуации площадь инвертного треугольника будет равна 0, а Мр стремится к бесконечности. Это означает, что при расположении пунктов на 1-ой окружности, задача не имеет решения. Чтобы не попасть в этот «опасный» круг, самое лучшее положение пункта Р внутри этой окружности.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
|
|