Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Призначення області застосування, класифікація.
|
|
Електричні моментні двигуни постійного струму широко використовуються як виконавчі елементи в сучасних системах автоматики, телемеханіки, вимірювальної техніки.
Теорія, розробка і використання цих двигунів останніми роками активно розвиваються.
Розробники різних систем керування при виборі виконавчого двигуна стикаються з рядом завдань. Це –визначення доцільності вживання моментних двигунів, які поряд з великими перевагами не зрідка мають значно велике енергоспоживання і масу, в порівнянні з швидкохідними двигунами з редуктором. Крім того, це вибір структури і значень параметрів системи управління при умові порівняно великої електромеханічної постійної часу. При проектуванні моментних двигунів для конкретної системи необхідно вибирати технічні дані на його розробку по відомих характеристиках навантаження і вхідної дії, а також, виходячи з вимог до системи, вибирати конструкцію двигуна, виконувати необхідні розрахунки.
Метою справжнього проекту є розробка універсального лабораторного стенду для дослідження високомоментного двигуна.
Моментним двигуном (МД) називається електромеханічний перетворювач, на вхід якого подається електричний сигнал постійного або змінного струму, а виходом є електромагнітний момент, при якому в робочому режимі ротор або нерухомий, або обертається з вельми малою швидкістю.
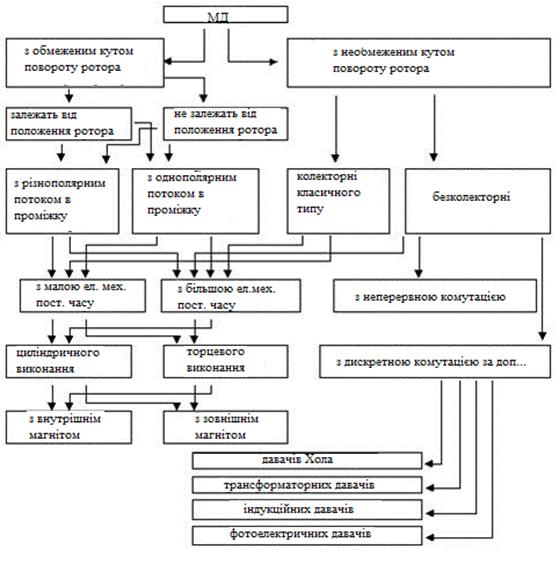
Рис. 6.1
1.1 Сфера застосування МД
1.1.1 У коректувальних пристроях гідросистем (для компенсації збурювальних моментів).
1.1.2 У пристроях силової компенсації (у системах з негативними о.с.).
1.1. 3 Використовуються як електричні пружини.
1.1. 4 Використовують як натягачі, щоб регулювати або зберігати незмінною силу натягнення дроту, стрічки, ланцюги і тому подібне
1.1.5 Як поворотні електромагніти керівників заслінками, клапанами, гальмівними пристроями і т.п.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
1.1. 6 В електроприводах (далі ЕП) тиристорів, транзисторних і в приводах подач металорізальних верстатів.
1.2 Основні вимоги до МДПМ
1.2. 1 Заданий діапазон кутів повороту ротора[1].
1.2. 2 Задана залежність моменту від положення ротора1.
 1.2. 3 Задана залежність моменту від сигналу, що подається в ОУ. В більшості випадків ця залежність лінійна.
1.2. 3 Задана залежність моменту від сигналу, що подається в ОУ. В більшості випадків ця залежність лінійна.
1.2.5 Відношення, що особливо важливе при малопотужних джерелах живлення. Із збільшенням Mем і розмірів МДПМ споживана потужність на одиницю моменту зазвичай зменшується.
1.2. 6 За відсутності струму в ОУ, залишковий момент має бути вельми малий (взагалі бути відсутнім).
1.2.7 Постійні часу мають бути якомога менше. Великі постійні часу знижують швидкодію і можуть привести до нестійкості системи спостереження.
1.2.8 Чутливість, визначувана найменшою потужністю сигналу, на яку система починає реагувати, має бути високою.
1.2.9 Маса і габарити - min.
1.2.10 Стійкість по відношенню до зовнішніх дій (температура, вібрація, удари, тиск, вологість, прискорення, радіація і тому подібне).
1.3 Достоїнства високомоментного двигуна
1.3.1 Завдяки відсутності обмотки збудження (ОВ) і втрат в цих обмотках машини з постійними магнітами мають в порівнянні з машинами електромагнітного збудження вищий ККД, полегшені умови охолоджування.
1.3.2 Малі габарити і маса.
1.3.3 Стабільніше збудження (потік постійних магнітів не залежить ні від частоти обертання ні від напруги ні від температури).
1.3.4 Простота конструктивного виконання, коли магнітна система є намагніченим певним чином кільцем з магнітотвердого матеріалу.
1.3.5 Наявність постійних магнітів (ПМ) забезпечує високі значення кутового прискорення в перехідних режимах роботи.
1.3.6 Наявність ПМ забезпечує рівномірний хід при малих частотах обертання.
1.3.7 Наявність ПМ забезпечує здатність витримувати велике перевантаження по струму без розмагнічування магнітної системи.
1.4 Недоліки високомоментного двигуна
1.4.1 Напругу генераторів і частоту обертання двигунів неможливо регулювати зміною поля збудження.
1.4.2 При потужності більше десятків ватів вони поступаються по габаритних розмірах, масі і вартості машинам електромагнітного збудження.
1.4.3 Матеріали, що входять до складу сплавів для ПМ дефіцитні.
1.4.4 Технологія виготовлення і намагнічування ПМ відрізняється великою складністю.
1.4.5 Істотна розмагнічувальна дія МДС якоря.
1.4.6 Забороняється в МДПМ витягувати ротор без заміни його на яке-небудь металеве тіло таких же розмірів.
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
Конструктивні різновиди високомоментного двигуна
Слід зазначити, що в деяких МД з необмеженим кутом повороту ротора частота обертання в сталому режимі може виявитися досить значною (у таких випадках не можна провести чітку грань між МД і тихохідним двигуном). Проте якщо цей МД використовується в системі спостереження, і він, працюючи в режимі частих пусків і реверсів, в основному обертається з малою частотою; отже, і в цьому випадку також можна вважати, що енергія, що підводиться з мережі, майже повністю виділяється у вигляді тепла в обмотках. МД постійного струму широко застосовуються як виконавські елементи в сучасних системах автоматики, телемеханіки, вимірювальної техніки. Ці двигуни використовуються в гіроскопах і акселерометрах, в приводах антен, телескопів, фотоапаратів, сонячних і зоряних датчиків, роботів і маніпуляторів; у автоматичних будівниках графіків; як силові компенсатори у вимірювальних системах; як елементи електрогідравлічних і електропневматичних приводів; як електричні пружини поворотних електромагнітів і так далі.
Якщо МД працює в режимі стеження, то його роль аналогічна ролі швидкохідного виконавчого двигуна у поєднанні з редуктором. Проте МД, не зрідка володіючи більшими, ніж в приводу редуктора, енергоспоживанням, масою і електромеханічною постійною часу, має в порівнянні з приводом редуктора вельми істотні переваги. До них відносяться висока роздільна здатність МД унаслідок відсутності неминучих в редукторі МД постійного струму широко застосовуються як виконавські елементи в сучасних системах автоматики, телемеханіки, вимірювальної техніки. Ці двигуни використовуються в гіроскопах і акселерометрах, в приводах антен, телескопів, фотоапаратів, сонячних і зоряних датчиків, роботів і маніпуляторів; у автоматичних будівниках графіків; як силові компенсатори у вимірювальних системах; як елементи електрогідравлічних і електропневматичних приводів; як електричні пружини поворотних електромагнітів і так далі.
Якщо МД працює в режимі стеження, то його роль аналогічна ролі швидкохідного виконавчого двигуна у поєднанні з редуктором. Проте МД, не зрідка володіючи більшими, ніж в приводу редуктора, енергоспоживанням, масою і електромеханічною постійною часу, має в порівнянні з приводом редуктора вельми істотні переваги. До них відносяться висока роздільна здатність МД унаслідок відсутності неминучих в редукторі люфтів і тертя, стабільність механічних властивостей при зміні умові довкілля, висока резонансна частота, можливість установки на одному валу і в загальному корпусі з виконавчим механізмом, простота конструкції, вища надійність.
МД випускаються на моменти від декількох десятитисячних до декількох тисяч ньютона-метрів при споживаній потужності від доль ватів до десятків кіловат, масі до сотень кілограмів, довжині до 0, 3 м-коду і вище і діаметрі до 1, 2 м-коду.
Якість МД тим вище, чим більше відношення моменту, МД, що розвивається, до об'єму, маси, споживаної потужності, потужності керування, чим менше електромагнітна і електромеханічна постійні часу, а також чим менше залишковий момент (момент чіпання) при нульовому сигналі, що виникає в МД унаслідок тертя, гістерезису, нерівномірності повітряного зазору, неоднорідності магнітних матеріалів і незбалансованості ротора.
МД можуть класифікуватися по їх призначенню, принципу дії, роду струму, а також по конструктивному виконанню: однойменно полюсні або різнойменно полюсні, з радіальним повітряним проміжком або торцеві, з нерухомою (барабанною, кільцем) або рухомою обмоткою, із зубцево-пазовою зоною або без пазові (з гладким якорем), колекторні або вентильні, з обмеженим або необмеженим кутом повороту і так далі.
Нижче приведені класифікація МД залежно від їх призначення і короткі відомості про сфери їх застосування.
У гіроскопах, акселерометрах і в інших пристроях широко застосовуються коректувальні МД. У вказаних пристроях, що знаходяться, наприклад, на борту літального апарату (ЛА), вісь ротора гіроскопа під впливом механічних опорів, зміни в процесі польоту географічних координат положення літального апарату і із-за обертання Землі може змінити своє положення відносно заданого. Завдання коректувального МД полягає в тому, щоб компенсувати відповідні моменти, щоб забезпечує незмінність положення осі гіроскопа відносно нерухомої системи координат. Момент коректувальних МД невеликий і зазвичай складає від декількох десятитисячних до декількох тисячних, а інколи до декілька сотих ньютона-метра. Для зменшення компонента залишкового моменту, викликаного гістерезисом, коректувальні МД постійного струму з електромагнітним збудженням в деяких гіроскопічних системах забезпечуються розмагнічувальними обмотками змінного струму.
У багато чисельних системах керування положенням різних крупніших об'єктів (антени, телескопа, фотоапарата, сонячного або зоряного датчика, роботів, маніпуляторів і т. д.) застосовуються стабілізуючі МД, що розвивають значно великі моменти. При відхиленні об'єкту від заданого положення МД створює момент, що впливає на яку-небудь вісь або платформу повертаючи об'єкт в потрібне положення. Інколи такі МД одночасно виконують функції поворотних елементів при переведенні об'єкту з одного кутового положення в інше.
Часто МД використовуються як силові компенсатори у вимірювальних системах з негативним зворотним зв'язком. Так, в деяких манометрах зміна положення мембрани під впливом підвищення або пониження контрольованого тиску перетвориться в електричний сигнал, який після посилення подається в обмотку управління (ОУ). При цьому в МД виникає момент, що утримує мембрану в нейтральному положенні. По величині струму що подається в ОУ, можна судити про значення контрольованого тиску.
У деяких системах вимірювання і автоматики МД використовуються як електричні пружини, замінюючи собою механічні. Часто МД застосовуються як натягачі, що дозволяють регулювати або зберігати незмінними силу натягнення стрічки, плівки і так далі Деякі МД використовуються в автоматичних будівниках графіків.
МД широко застосовуються в різних пневмо- і гідросистемах, де вони зазвичай працюють в пропорційному режимі (на ротор МД окрім електромагнітної сили впливає протидіюча сила, що створюється механічною пружиною або електромагнітним способом, так що кожному значенню сигналу, що подається в ОУ, відповідає певне положення ротора).
Часто МД використовуються як поворотні (або лінійних) електромагніти, керівників різними кранами, клямками і так далі При подачі сигналу в ОУ такі МД зазвичай здійснюють переміщення, строго зафіксовані за значенням.
Нарешті, до МД відносяться електромеханічні вузли багатьох вимірників, оптичних і інших приладів, в яких момент, що розвивається двигуном, врівноважується механічною пружиною, а виходом приладу є кут повороту, залежний від сигналу, що подається в ОУ.
Залежно від принципу дії МД можуть виконуватися як момент двигуни з постійними магнітами (магнітоелектричні), як реактивні (з електромагнітним або комбінованим збудженням) і як електродинамічні. Принцип роботи моментного двигуна з постійними магнітами (МДПМ) заснований на взаємодії між струмом в ОУ і полі постійного магніту (ПМ). Істотною гідністю МДПМ є порівняльний малий вжиток потужності на одиницю моменту, оскільки основний магнітний потік цього двигуна забезпечується за допомогою ПМ. Залежність електромагнітного моменту МДПМ від сигналу, що подається в ОУ, близька до лінійної. Обмотка управління МДПМ харчується постійним струмом; при зміні полярності живлячої напруги міняється знак моменту. МДПМ без магнітно-м'яких полюсних наконечників постійних магнітів володіє малою електромагнітною постійною часу, оскільки потік ОУ повинен проходити через зони великого магнітного опору; в цілях зменшення електромагнітною постійною часу (а також зубцевій пульсації моменту) використовують гладкий статор з без пазової активною зоною. До недоліків МДПМ слід віднести деяку складність конструкції.
Електромагнітний МД має явнополюсний ротор, виконаний з магнітно-м'якого матеріалу, і за принципом дії є реактивним. При подачі струму в ОУ такого електродвигуна ротор починає повертатися у бік максимальної провідності магнітному потоку. Принцип дії електромагнітного МД накладає обмеження на значення кутового зсуву ротора відносно статора, хоча при відповідного конструктивного виконання воно може досягати 150 градусів. Вжиток потужності на одиницю моменту такого МД зазвичай більше, ніж в МДПМ (за винятком електромагнітів з вельми малим кутом повороту ротора). Конструктивно електромагнітний МД досить простий, проте забезпечити лінійну залежність його моменту від сигналу, що подається в ОУ, неможливо. Не можна здійснити і строгу постійність моменту по куту повороту ротора. Індуктивність ОУ велика, унаслідок чого велика і електромагнітна постійна часу. Знак моменту не залежить від напряму струму в ОУ, тому МД часто потребує поворотної пружини або в здвоєній конструкції. Живлення ОУ може виконуватися як постійним, так н змінним струмом.
В поляризованого МД потік в зонах взаємодії статора і ротора створюється спільно з ПМ і ОУ. Явнополюсний ротор виконується магнітно-м'яким або ж містить ПМ. У одних повітряних проміжках моментних двигунів МДС ПМ і ОУ, а отже, і відповідні індукції направлені згідно, а в других—зустрічно; в результаті виникає реактивний момент, що обертає, направлений у бік зменшення магнітного опору тих повітряних зазорів, в яких індукції складаються. Живлення ОУ здійснюється постійним струмом: для реверсування МД треба змінити напрям струму в ОУ. Діапазон кутів повороту ротора зазвичай складає декілька градусів. При невеликих відхиленнях ротора від середнього положення момент пропорційний струму ОУ і мало залежить від кута повороту ротора. Оскільки основна доля в сумарному потоці такого МД доводиться на потік постійного магніту, споживана потужність на одиницю моменту, а також електромагнітна постійна часу значно менше, ніж в електромагнітного МД.
Принцип дії електродинамічних МД заснований на взаємодії двох обмоток із струмом, при цьому якщо хоч би одна з обмоток розміщена на осерді з магнітно-м'якого матеріалу, то МД називають феродинамічними. Ці МД відрізняються порівняно великим вжитком потужності на одиницю моменту. Обмотки таких МД можуть харчуватися як постійним, так і змінним струмом. Залежність моменту від струму ОУ лінійна. Для зміни знаку моменту МД, що живиться постійним струмом, треба змінити полярність напруги, що подається на ОУ, а моменту МД, що живиться змінним струмом, — фазу цієї напруги.
Найбільшого поширення серед МД постійного струму набули МДПМ.
МДПМ з обмеженим кутом повороту ротора характеризується тим, що вісь МДС обмотки управління при різних положеннях ротора міняє своє положення по відношенню до осі ПМ.
Конструктивно МДПМ можуть виконуватися як нормального (ОУ розміщується під індуктором), так і оберненого виконання, при цьому ОУ може знаходитися як на роторі, так і на статорі. Залежність електромагнітного моменту від сигналу, що подається в ОУ, досить близька до лінійної. За рахунок полюсних наконечників або геометрії повітряного зазору можна у разі потреби отримати необхідну закономірність зміни моменту по куту повороту ротора. Зокрема, можна добитися практичної незалежності моменту від положення ротора при даному сигналі в ОУ. При різнополярному симетричному потоці в повітряному зазорі в МДПМ з р парами полюсів і умові незалежності моменту від положення ротора діапазон кутів повороту ротора не може перевищувати 360°/2p (практично при р=1 не більш 120— 130 градусів). При однополярному потоці відповідний діапазон кутів може досягати 260—270 градусів. Якщо кут повороту ротора не перевищує декількох градусів, то МДПМ може бути виконаний за типом звичайного двигуна постійного струму, але з живленням якірної обмотки через гнучкі струмопроводи.
МДПМ з необмеженим кутом повороту ротора характеризується тим, що вісь МДС обмотки управління при різних положеннях ротора зберігає майже незмінне положення по відношенню до осі ПМ за рахунок комутації струмів в секціях ОУ. Момент лінійно залежить від сигналу в ОУ і майже не залежить від положення ротора.
Прикладом МДПМ з необмеженим кутом повороту ротора може служити багатополюсна магнітоелектрична колекторна машина з обмоткою якоря хвилевого типа. Недоліки колекторних електродвигунів, які, як правило, пов'язують з малою надійністю щітково-колекторного вузла і радіоперешкодами, що викликаються іскрінням з-під щіток при комутації секцій, відносно колекторних МДПМ, Прикладом МДПМ з необмеженим кутом повороту ротора може служити багатополюсна магнітоелектрична колекторна машина з обмоткою якоря хвилевого типа. Недоліки колекторних електродвигунів, які, як правило, пов'язують з малою надійністю щітково-колекторного вузла і радіоперешкодами, що викликаються іскрінням з-під щіток при комутації секцій, відносно колекторних МДПМ.
У тих випадках, коли за умовами експлуатації вживання колекторних МДПМ недопустимо, знаходять широке вживання вентильні МД, секції яких підключаються до мережі за допомогою напівпровідникових ключів (вентилів). Вказані електродвигуни мають, як правило, оберненого виконання з розташуванням індуктора на роторі. Комутація струмів в секціях ОУ вентильних МДПМ може здійснюватися як дискретно, так і безперервно. Дискретна МДПМ може здійснюватися як дискретно, так і безперервно. Дискретна комутація здійснюється за допомогою датчиків положення ротора (датчиків Холу, трансформаторних, індукційних і ін.), керівників напівпровідниковими ключами, які підключають до мережі постійного струму трьох- або чотирьохфазну обмотку статора. Проте в таких МД мають місце значні пульсації моменту по куту повороту ротора (що досягають 10—15 %), що викликаються як комутаційними процесами при перемиканні фаз, так і дискретні мі поворотами МДС статора. При збільшенні кількості тактів за один зворот ротора пульсації моменту зменшуються, проте зростає число датчиків положення або ускладнюється схема. Безперервна комутація здійснюється за допомогою синусно-косинусних трансформаторів (СЬКВТ), що обертаються, керівників струмами ОУ МДПМ через фазочутливі підсилювачі-перетворювачі (ФЧУП). В деяких випадках для безперервної комутації використовуються датчики Холу або ємкісні датчики.
Ротором МДПМ з обмеженим або необмеженим кутом повороту може бути сама ОУ, розміщена на каркасі з немагнітного матеріалу; в цьому випадку електромеханічна, а також електромагнітна постійні часу МДПМ вельми малі, а момент, обумовлений гістерезисом або нерівномірністю повітряного зазору, відсутній. При цьому у зв'язку з великим повітряним зазором зменшується індукція в зазорі і зростає потік розсіяння.
|
|