Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Статические и динамические показатели систем ЭП
|
|
При решении задач оптимального проектирования рассчитываются зависимости ограничений от каждого из варьируемых параметров и определяется область возможной реализации. При линейной зависимости оптимальное решение всегда находится на одной из вершин, т.е. в точке, соответствующей совпадению ограничений. Вывод: проектирование нужно проводить по предельным условиям эксплуатации, а не по номинальной точке.
Технические ограничения можно разделить на два класса:
· статические.
· динамические.
Статические показатели удобно представлять в виде желаемой механической и электромеханической характеристики ЭП.
 1 Реверс.
1 Реверс.
2 Наличие торможения вперед и назад.
3 Диапазон регулирования:
- скорости
Dω ↑ =  =
=  , Dω ↓ =
, Dω ↓ = 
- диапазон изменения момента:
4 Статическая точность поддержания скорости или момента.
∆ ω С1 =  %
%
Относительное отклонение скорости оговаривается по отношению к каждому из возможных возмущений (нагрузка, напряжение питания, температура), дополнительно приводится суммарная погрешность.
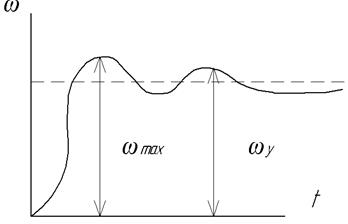
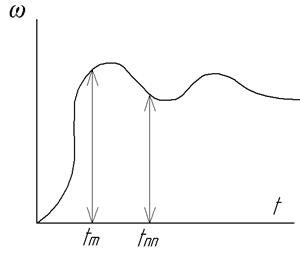
Динамические показатели
Описывают качество переходных процессов в системе.
Рассчитываются и оцениваются при ступенчатом входном воздействии.
1 Максимальное отклонение или динамическая ошибка регулирования – определяется в относительных единицах. За базу принимается минимальное или номинальное значение.
2 Установившееся отклонение ω у (установившаяся ошибка).
3 Перерегулирование
σ =  %
%
4 Время достижения максимума tm.
5 Время переходного процесса tпп.
Временные параметры определяются по входу сигнала в 5% коридор относительно установившегося или псевдоустановившегося значения (вынужденная составляющая переходного процесса).
При сложном переходном процессе выделяется свободная составляющая sin с затуханием по экспоненте и вынужденная.
Временные показатели определяются по 5% коридору относительно максимального значения вынужденной составляющей.
Частота колебаний соответствует частоте среза контура регулирования.
tm =  , ω с – частота среза, когда контурный коэффициент передачи равен 1.
, ω с – частота среза, когда контурный коэффициент передачи равен 1.
tпп = 
6 Число колебаний m
m = 
Число колебаний определяется числом полупериодов. В замкнутых системах регулирования число колебаний и перерегулирование зависят от запаса устойчивости по фазе.
4) Разработка структурных схем с использованием графов
Граф – графическое представление взаимосвязей переменной в системе.
В вершинах (или узлах) изображаются переменные. Стрелками показывается направление взаимодействия. Над стрелками располагаются постоянные величины, влияющие на взаимосвязь.
Построение графа – разработка системы обозначений и допущений, принятых в расчете.
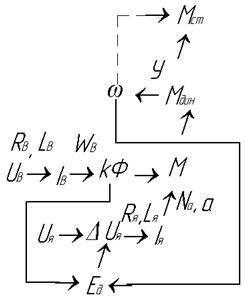 Пример: ДПТ НВ
Пример: ДПТ НВ
кФ = const ОВ: Индуктивность – отношение изменения потока к изменению тока возбуждения. Чем быстрее скорость, тем больше нагрузка.
Построенный граф позволяет выделить парные взаимосвязи переменных, определить общую структуру системы, исключить промежуточные переменные.
IB = 
Na – число активных проводников
а – число ветвей
Для упрощения рассмотрим режим работы с постоянным потоком.
UB, IB, kФ – не изменяются.
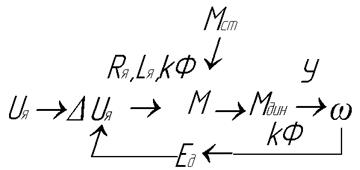 Тогда получим:
Тогда получим:
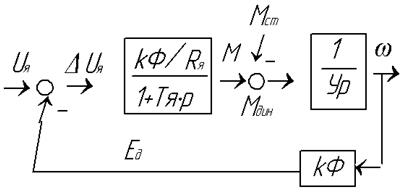
По упрощенному графу составляется структурная схема – определяются передаточные функции между парными взаимодействиями и уравнения для узлов.
Uя – Ед = ∆ Uя в двигательном режиме
 М – Мст = Мдин
М – Мст = Мдин
М = 
 = р - операторная форма записи
= р - операторная форма записи
ω = 
Ед = кФω
На структурной схеме переменные обозначаются стрелками, взаимосвязи – прямоугольниками.
Wяц =  , Тя =
, Тя =  , кя =
, кя =  ;
; 
|
|