Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Для новых пользователей первый месяц бесплатно. Чат-бот для мастеров и специалистов, который упрощает ведение записей: — Сам записывает клиентов и напоминает им о визите;
— Персонализирует скидки, чаевые, кэшбэк и предоплаты;
— Увеличивает доходимость и помогает больше зарабатывать; Начать пользоваться сервисом

Индуктивные преобразователи.
|
|
2.1 Простейший индуктивный преобразователь.
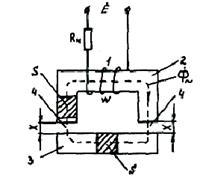
Схема простейшего индуктивного преобразователя с плоским якорем приведена на рис.3.1
Обмотка 1 через сопротивление нагрузки RН подключена к сети переменного тока. Магнитный поток Ф, создаваемый переменным током, протекающим по обмотке 1, проходит через магнитопровод 2, воздушный зазор 4 и замыкается через подвижный якорь 3. Магнитопровод и якорь изготовляются шихтованными из материала с достаточно большой магнитной проницаемостью и малыми потерями (электротехнические стали, пермолои и т. д.) на гистерезис и вихревые токи.
|
| Рис.3.1 Простейший индуктивный преобразователь |
В следствии того, что магнитное сопротивление ферромагнитного якоря 3 и сердечники 2 мало, индуктивность обмотки резко изменяется при изменении параметров воздушного зазора. При увеличении длины X рабочего воздушного зазора (РВЗ) общее магнитное сопротивление возрастает, индуктивность обмотки падает, и ток в цепи нагрузки возрастает. Наоборот, приближение якоря к магнитопроводу сопровождается ростом индуктивного сопротивления обмотки и следовательно, уменьшением тока в ней.
Если длина X воздушного зазора невелика в сравнении с шириной магнитопровода, то поток рассеяния мал и индуктивность обмотки 1 с достаточной точностью можно выразить формулой
 , (3.1)
, (3.1)
где L - индуктивность, Гн;
W - число витков обмотки 1;
X - длина воздушного зазора, м;
S – площадь сечения потока в воздушном зазоре, принимается равной площади сечения стержней магнитопровода, м2;
RЖ - сопротивление магнитопровода, Гн-1;
μ 0- магнитная постоянная. Гн∙ м-1.
Если длина магнитного зазора соизмерима с шириной, то его магнитное сопротивление значительно больше магнитного сопротивления железа
 > > RЖ=
> > RЖ=  (3.2)
(3.2)
и формула (3.1) примет вид
 , (3.3)
, (3.3)
При синусоидальном напряжении сети и выполнении условии (3.2) ток в обмотке 1 практически синусоидален, т.к. при условии (3.2) преобладает линейная зависимость его от длины рабочего воздушного зазора.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
 , т.к.
, т.к.  L> > R~, то
L> > R~, то  (3.4)
(3.4)
Итак, пренебрегая активным сопротивлением обмотки, магнитным сопротивлением железа, потоками рассеяния, мы получим линейную зависимость тока нагрузки от перемещения X якоря.
Согласно сделанным допущениям сопротивление цепи чисто индуктивное, сдвиг фаз между напряжением и током равен 900.
|
| Рис.3.2 Характеристики однотактного индуктивного преобразователя с плоским якорем. |
Реальная характеристика датчика отличается от полученной идеализированной характеристики в области малых и больших зазоров. Эта реальная характеристика на рис.3.2 обозначена пунктиром. Отличие реальной характеристики, идеализированной в области малых РВЗ, обусловлено главным образом, магнитным сопротивлением железа, а при больших - наличием активного сопротивления цепи обмотки. Сдвиг фаз между током и напряжением в цепи реального датчика (пунктирная линия) уменьшается с увеличением зазора, что и показано на рис.3.2.
Рассмотренный простейший индуктивный преобразователь почти не используется в САУ и измерительных схемах по следующим причинам: Во-первых, это преобразователь однотактный; во-вторых, при значительной мощности сигнала выходной цепи на якорь действует значительная сила притяжения
 ,
,
или момент
М=  ,
,
где α – угол поворота якоря.
если воспользоваться приближённым выражениями (3.3) и (3.4), то получим
 , (3.5)
, (3.5)
т.е. сила притяжения якоря пропорциональна коэффициенту чувствительности по току

и обратно пропорциональна частоте питания и не зависит от длины рабочего воздушного зазора (рис.3.2).
2.2 Двухтактный индуктивный преобразователь.
Широкое применение имеют двухтактные индуктивные преобразователи, собранные по дифференциальной или мостовой схеме.
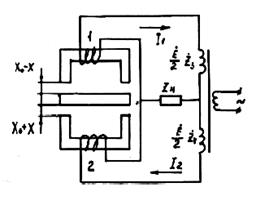
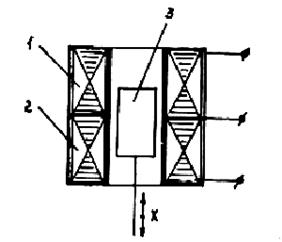
Дифференциальная схема состоит из двух независимых цепей, разность токов в которых служит выходным сигналом. На рис.3 изображена схема включения двухтактного преобразователя с плоским якорем. Выходной сигнал равен разности токов I1-I2. Механическим входным сигналом служит смешение якоря X относительно среднего положения. При Х=0 длина воздушных зазоров одинакова и равна X0, индуктивности обмоток 1 и 2 равны между собой, токи I1 и I2 одинаковы и ток через нагрузку, определяемый разностью токов Δ I=I1-I2 равен 0.
При смещении якоря один из токов уменьшается, другой увеличивается и появляется выходной сигнал. Фаза выходного сигнала при смене направления отклонения входного сигнала относительно среднего положения меняется на 1800. Датчики с плоским якорем применяется для измерения малых перемещений от нескольких микрон до 2 – 3 мм. При больших перемещениях применять индуктивные преобразователи с плоский якорем нецелесообразно.
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
|
| Рис.З.3 Дифференциальная схема включения обмоток двухтактного преобразователя с плоским якорем. |
Аналогично функционирует преобразователь, собранный по мостовой схеме (рис.3.4). При Х=0 выполняется условие равновесия моста

следовательно, в измерительной диагонали  = 0. При перемещении якоря равновесие моста нарушается и ≠ 0. По нагрузке ZH протекает ток.
= 0. При перемещении якоря равновесие моста нарушается и ≠ 0. По нагрузке ZH протекает ток.
|
| Рис.3.4 Мостовая схема включения обмоток двухтактного преобразователя с плоским якорем. |
Для измерения перемещений до нескольких сантиметров используются преобразователи плунжерного типа (рис.3.5).
|
| Рис.3.5 Индуктивный преобразователь плунжерного типа. |
Преобразователь плунжерного типа представляет собой соленоид с одной или двумя обмотками. Для уменьшения магнитного потока, замыкающегося через воздух, катушку соленоида заключают в стальной кожух. Перемещая якорь 3, выполненный в виде плунжера (сердечника), можно менять длину РВЗ и, следовательно, индуктивность катушек 1 и 2. Обмотки 1 и 2 могут соединяться как по дифференциальной схеме, так и мостовой.
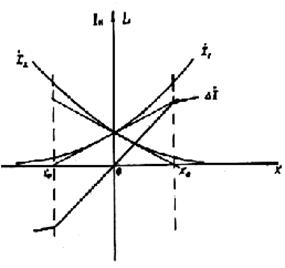
Индуктивный реверсивный преобразователь обладает двухтактной статической характеристикой. В пределах изменения входного сигнала можно выбрать достаточно большой (по сравнению с однотактным преобразователем) линейный (рис.3.6) рабочий участок статической характеристики.
Сила, действующая на якорь преобразователя (дифференциальная схема), равна
и по величине может быть меньше, чем в однотактной схеме.
Отличие мостовой схемы от дифференциальной заключается лишь в том, что выходной величиной в мостовой схеме служит разность напряжений двух цепей, которые при наличии нагрузки не являются независимыми.
|
| Рис.3.6 Статическая характеристика индуктивного реверсивного преобразователя. |
Напряжение U0(x) (напряжение холостого хода) на выходе (рис.3.4) при отключенной нагрузки равно
 =
= 
При включённой нагрузке
 =
= 
где ZВЫХ – внутреннее (выходное) сопротивление моста при пренебрежимо малом сопротивлении источника.
Согласно обоим свойствам четырёхполюсников максимальная активная мощность в нагрузке выделяется при равенстве активного сопротивления нагрузки и активной составляющей внутреннего сопротивления, т.е.
 , ХН= –ХВЫХ (3.6)
, ХН= –ХВЫХ (3.6)
Реактивное сопротивление ХВЫХ схем преобразователей рассматриваемого типа являются индуктивным, поэтому для выполнения условия ХН=–ХВЫХ, реактивное сопротивление нагрузки должно быть ёмкостным. Схемы, где обеспечивается выполнение условия (3.6), называются резонансными. Для выполнения условия резонанса последовательно с нагрузкой включают конденсатор. Индуктивное внутреннее сопротивление датчика меняется при перемещении якоря, поэтому строгое выполнения условия резонанса при заданной емкости конденсатора имеет место для одного положения якоря.
В некоторых случаях нагрузка подключается к индукционному преобразователю через повышающий трансформатор (рис.3.7).
|
| Рис.3.7 Включение нагрузки через повышающий трансформатор в мостовой схеме. |
При таком включении выгодно помещать конденсатор на высоковольтной стороне, т.к. условие резонанса в этом случае выполняется при меньшей ёмкости конденсатора.
3. Индукционные (трансформаторные) преобразователи.
3.1. Принцип работы.
Помимо преобразователей, принцип функционирования которых основан на изменении индуктивности (коэффициента самоиндукции), применяются преобразователи в которых используется изменение взаимной индукции обмоток (коэффициента взаимоиндукции  ) при перемещении подвижных частей.
) при перемещении подвижных частей.
Такие устройства называют трансформаторными или индукционными преобразователями.
На рис.3.8. изображены две схемы трансформаторных преобразователей. В схеме рис. 8а при смещении якоря 1 относительно среднего положения взаимные индуктивности обмотки питания 2 со встречно включенными обмотками 3 выходного сигнала становятся не одинаковыми, и на выходе появляется напряжение U. Фаза напряжения меняется на противоположную при изменении знака смещения якоря.
|
| Рис.3.8. Трансформаторные преобразователи. |
В преобразователе (схема рис.3.8.б) поворотная катушка 1 находится в радиальном поле, создаваемым обмоткой 2 в зазоре между полюсом и цилиндрическим сердечником 3. При одинаковом РВЗ поток, пронизывающий катушку, пропорционален углу α и преобразователь имеет линейную характеристику в широком диапазоне изменения входного сигнала α (характеристика одноконтактная). Индукционные преобразователи имеют такие же статические характеристики как и индуктивные. Расчёт сил, действующих на якорь трансформаторных преобразователей аналогичен.
3.2. Общие свойства преобразователей.
Отсутствие скользящих контактов, прочность конструкции обуславливает высокую надёжность индуктивных и индукционных преобразователей. Достоинствами их являются также высокие чувствительность и разрешающая способность. Например, коэффициент чувствительности дифференциального преобразователя с плоским якорем часто составляет несколько сот вольт на 1 мм, а разрешающая способность измеряется сотыми долями микрона. Надо заметить, что высокая разрешающая способность достигается тщательным экранированием и регулировкой цепей преобразователя.
Изготовляются преобразователи с выходной мощностью в несколько десятков ватт. При повышенной частоте питания объем и вес приходящийся на единицу выходной мощности, невелики. Индукционные преобразователи обладают значительным КПД.
К недостаткам относятся трудность регулировки, трудность получения нулевого сигнала на выходе.
Для определения фазы выходного сигнала с индуктивными и индукционными преобразователями используют демодуляторы (фазочувствительные устройства).
Вопросы для самопроверки.
1. Принцип работы индуктивных преобразователей.
2. Принцип работы индукционных преобразователей.
3. Схема включения обмоток индуктивных преобразователей и схемы включения обмоток индукционных преобразователей.
4. Статические характеристики и чувствительность.
5. Условие получения максимальной чувствительности.
6. Схемы включения индуктивных и индукционных преобразователей.
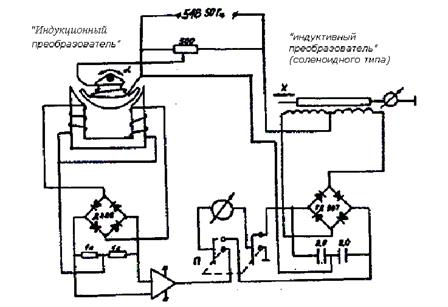
|
| Рис.3.9.Схема лабораторной установки. |
|
|