Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Микропроцессорная система управления шаговым двигателем
|
|
Управление ШД, как уже отмечалось, обеспечивается электронным блоком управления. Современные блоки управления ШД состоят из нескольких функциональных узлов, выполняемых по различным схемам и использованием разнообразных элементов. Стремление расширить области дискретного привода, повысить качество и точность его движения, надежность, удобство и простоту в наладке и эксплуатации отразилось в унификации схем управления ШД. Рассмотрим обобщенную структурную схему ЭП с ШД (рисунок 13.10). Основная ее часть, обычно называемая разомкнутой схемой, выделена штриховой линией.
Сигнал управления fy в виде импульсов напряжения поступает на вход 2 от программного или другого внешнего командного устройства. Блок 2 видоизменяет эти импульсы, формируя их по длительности и амплитуде, как необходимо для нормальной работы последующих блоков схемы управления. Распределить импульсов 3 преобразует последовательность сформированных импульсов, например, в четырехфазную систему однополярных импульсов напряжения, соответствующего числу фаз (обмоток) двигателя.
Импульсы с выхода распределения 3 усиливаются с помощью промежуточного усилителя 4 и поступают на коммутатор 5, питающий обмотки ШД 8. Обычно коммутатор питается от источника 12 постоянного тока (выпрямителя) и обеспечивает в обмотках ШД пульсирующих ток одного направления.
Рассмотренная разомкнутая схема управления ШД не всегда обеспечивает высокие динамичные свойства, точность и энергетические показатели ЭП. Поэтому современные схемы управления ШД содержат дополнительные узлы, с помощью которых характеристики ЭП улучшаются. К таким узлам (рисунок 13.10) относятся частотно-импульсный регулятор 11 напряжения, усилитель 10 обратной связи по току, блок 13 электронного дробления шага, блок 1 плавного разгона и торможения (задатчик интенсивности), датчик 7 положения ротора и скорости цифровой регулятор 6.
Регулятор 11 и усилитель 10, связанные с узлом 9 сравнения, служат для автоматической стабилизации тока в обмотках ШД и поддержания момента ШД, что существенно улучшает энергетические показатели его работы. Стабилизация тока осуществляется введением отрицательной обратной связи по току, с помощью которой за счет регулирования частоты переключения регулятора 11 (частотно-импульсная модуляция) изменяется среднее значение напряжения питания и тем самым регулируется ток в обмотках ШД. Та же задача формирования тока в обмотках ШД решается при использовании коммутатора 5, обладающего свойствами источника тока. В этом случае отпадает надобность в обратной связи по току и блоках 11 и 10.
Для улучшения движения ШД при низких частотах и повышения точности отработки входных импульсов управления с помощью блока 13 уменьшается единичный шаг ШД.
Улучшение динамичных свойств дискретного ШД, в частности увеличение диапазона рабочих частот входного сигнала, значительно превышающих частоту приемистости ШД, может быть достигнуто введением в схему блока 1, обеспечивающего разгон и торможение ШД с заданным темпом, при котором еще не происходит пропуска управляющих импульсов. При использовании блока 1 область рабочих шагового электропривода может быть увеличена в 2 – 3 раза.
Возможности дискретного ЭП расширяются, при создании замкнутых схем управления, выполняемых с помощью датчика 7 и регулятора 6. В таком дискретном приводе информация о действительном положении вала и скорости ШД поступает на ввод цифрового регулятора 6, которой обеспечивает заданный характер движения привода.
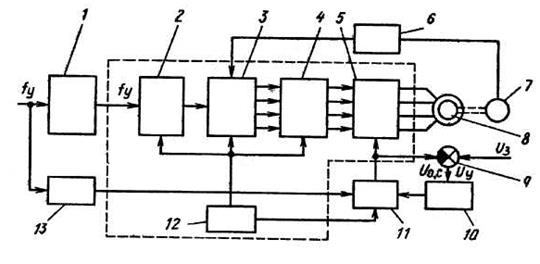
Рисунок 13.10 – Структурная схема ЭП с ШД
Анализ схем управления шаговым двигателем свидетельствует, что перспективы дальнейшего развития АЭП с ШД связаны с использованием микропроцессорных средств управления. В этом случае функции всех элементов структурной схемы системы управления (рисунок 14.10), за исключением силового коммутатор, датчиков скорости и положения, выполняет микропроцессор по соответствующей программе. Следовательно, аппаратная реализация схемы управления ШД заменяется более гибкой и функционально богатой программной.
В связи с тем, что область применения дискретного привода постоянно расширяется (его всё шире используют кроме электропривода РЭСБН в газорезательных и сварочных автоматах, приборах времени, нажимных устройствах, в медицинской технике, в производстве элементов микроэлектроники и т.д.) актуальной становится разработка микропроцессорных систем управления ШД.
Текст составил доцент кафедры «Радиоэлектроника»
________Н.В. Руденко
|
|