Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Для новых пользователей первый месяц бесплатно. Чат-бот для мастеров и специалистов, который упрощает ведение записей: — Сам записывает клиентов и напоминает им о визите;
— Персонализирует скидки, чаевые, кэшбэк и предоплаты;
— Увеличивает доходимость и помогает больше зарабатывать; Начать пользоваться сервисом

Короткі теоретичні відомості. Вивчити конструкцію, принцип дії та експериментально дослідити основні характеристики трифазного асинхронного двигуна з короткозамкненим ротором.
|
|
Мета роботи
Вивчити конструкцію, принцип дії та експериментально дослідити основні характеристики трифазного асинхронного двигуна з короткозамкненим ротором.
Короткі теоретичні відомості
Із всіх електричних двигунів найбільш простими за конструкцією, надійністю в експлуатації, довговічністю та дешевизною є асинхронні трифазні двигуни. Вони складають більше 85% електричних двигунів, які використовуються в промисловості, в будівництві, на транспорті, в сільському господарстві та в інших галузях.
 В електричному двигуні відбувається процес перетворення електричної енергії в механічну за рахунок взаємодії магнітних полів. Тому для розуміння принципу дії електричних двигунів змінного струму необхідно знати як і які утворюються магнітні поля при протіканні синусоїдного струму в їх обмотках.
В електричному двигуні відбувається процес перетворення електричної енергії в механічну за рахунок взаємодії магнітних полів. Тому для розуміння принципу дії електричних двигунів змінного струму необхідно знати як і які утворюються магнітні поля при протіканні синусоїдного струму в їх обмотках.
Більшість електричних машин конструктивно представляє собою два коаксиальних циліндри, які відділені один від одного повітряним проміжком (рис.16.1). Циліндри зібрані із тонких листів електротехнічної сталі з метою зменшення втрат на вихрові струми. Зовнішній циліндр, звичайно нерухомий, називають статором, а внутрішній, який
обертається, - ротором.
Рис. 16.1.
|
виникає магнітне поле, лінії магнітної індукції якого замикаються по тілу статора, повітряних проміжках і тілу ротора. Місце виходу ліній магнітної індукції із статора приймають за північний полюс, а місце входу їх в статор – за південний. Отже, при одній обмотці маємо поле з однією парою полюсів, як показано на рис.16.1. Якщо в пазах статора розмістити дві обмотки, вісі яких змістити на кут  , то одержимо магнітне поле з двома парами полюсів.
, то одержимо магнітне поле з двома парами полюсів.
Лінії магнітної індукції, які охоплюють всю обмотку, зчіплюються зі всіма витками обмотки, а ті, що перетинають її, - лише з частиною витків. Тому магнітна індукція (магнітний потік на одиницю площі) на осі обмотки буде найбільшою, а перпендикулярно до неї – буде дорівнювати нулю. Оскільки опір магнітному потоку повітря і міді провідників обмотки, розташованих в пазах, великий, то магнітний потік, в основному, буде проходити між пазами і розподіл магнітної індукції у перерезі повітряного проміжку між статором і ротором буде мати ступінчастий вигляд, як показано на рис.16.2.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
Щоби одержати аналітичну залежність розподілу індукції по колу, ступінчастий графік можна розкласти в ряд Фурьє і розглянути першу гармоніку. Для першої гармоніки магнітна індукція в повітряному проміжку має найбільше значення  на вісі обмотки і дорівнює нулю на нейтральній лінії, яка перпендикулярна до її осі. Для точки, зміщеної відносно осі на кут a,
на вісі обмотки і дорівнює нулю на нейтральній лінії, яка перпендикулярна до її осі. Для точки, зміщеної відносно осі на кут a,  .
.
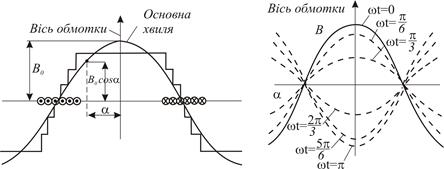
Рис.16.2. Рис.16.3.
Розподіл індукції за гармонічним законом у перерізі повітряного проміжку, як показано на рис.16.2, відповідає вказаному напрямку струму в обмотці. Коли обмотку живити синосоїдною напругою, то магнітний потік, який зчеплений з нею, і магнітна індукція в будь-якій точці розточки статора також будуть змінюватися за синусоїдним законом, тобто  . Позначивши максимальне значення індукції на вісі обмотки через
. Позначивши максимальне значення індукції на вісі обмотки через  , можна записати, що
, можна записати, що
 , /16.1/
, /16.1/
якщо рахунок часу вести з моменту, коли індукція має максимальне значення.Необхідно відмітити, що при зміні індукції в часі синусоїдний її розподіл по розточці статора не буде порушуватися (змінюється лише амплітуда). На рис. 16.3. показані криві індукції для різних моментів часу (від  до
до  ). З цього рисунка видно, що вісь магнітного поля займає незмінне положення у просторі і збігається з віссю обмотки. Магнітне поле, яке має змінну амплітуду, а вісь якого не змінює свого положення у просторі, називається пульсуючим магнітним полем.
). З цього рисунка видно, що вісь магнітного поля займає незмінне положення у просторі і збігається з віссю обмотки. Магнітне поле, яке має змінну амплітуду, а вісь якого не змінює свого положення у просторі, називається пульсуючим магнітним полем.
Пульсуюче магнітне поле не створює електромагнітного моменту. Його може створити магнітне поле, яке рухається. У 1885 р. італійський вчений В.Ферраріс відкрив явище обертового магнітного поля.
Для створення обертового магнітного поля по колу статора розташували три обмотки, вісі яких зсунуті одна відносно другої на кут  , як показано на рис.16.4.
, як показано на рис.16.4.
Рис.16.4. Рис.16.5.
При живленні цих обмоток симетричною трифазною системою синусоїдних напруг виникають три пульсуючі магнітні поля, вісі яких також будуть зсунуті на кут .
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
На рис.16.5 показана картина розподілу магнітної індукції у повітряному проміжку у випадку, коли в першій обмотці струм максимальний. Оскільки магнітний опір повітря сталий, то при визначенні результуючої індукції у бідь-якій точці можна використати принцип накладання. Згідно з цим принципом миттєве значення результуючої індукції в у точці, зміщеній відносно вісі першої обмотки на кут a, дорівнюватиме
 , /16.2/
, /16.2/
де  індукції, що створюють у цій точці пульсуючі поля, зв’язані з першою, другою і третьою обмотками.
індукції, що створюють у цій точці пульсуючі поля, зв’язані з першою, другою і третьою обмотками.
Якщо відлік часу будемо вести від моменту, коли індукція на вісі першої обмотки має максимальне значення, то, як і для однієї обмотки згідно з /16.1/,


 /16.3/
/16.3/
де  індукції на вісях відповідних обмоток, а
індукції на вісях відповідних обмоток, а  максимальне (амплітудне) значення на вісі кожної обмотки.
максимальне (амплітудне) значення на вісі кожної обмотки.
Склавши рівняння /16.3/ і замінивши добуток косинусів сумою за формулою  , одержимо
, одержимо
 /16.4/
/16.4/
тому що сума останніх трьох членів у рівнянні /16.4/ дорівнює нулю. У цьому легко переконатись, якщо використати формулу  .
.
Допустимо, що точка, в якій ми визначили індукцію, рухається по розточці статора від вісі першої обмотки з кутовою швидкістю  у від’ємному напрямку, тобто за годинниковою стрілкою. Тоді
у від’ємному напрямку, тобто за годинниковою стрілкою. Тоді  і в цій точці індукція
і в цій точці індукція
 . /16.5/
. /16.5/
З рівняння /16.5/ слідує, що вісь результуючого магнітного поля обертається у від’ємному напрямку з кутовою швидкістю , здійснюючи повний оберт за час, який дорівнює повному періоду змінного струму в обмотці. Значення індукції на цій осі стале і дорівнює  , а в розточці статора вона буде розподілена за синусоїдним законом.
, а в розточці статора вона буде розподілена за синусоїдним законом.
Магнітне поле, вісь якого обертається, прийнято називати обертовим магнітним полем. Коли величина індукції у повітряному проміжку в точці, яка лежить на вісі обертового поля, не змінюється, то таке поле називають коловим обертовим полем, бо його можна представити вектором сталої довжини, кінець якого, рухаючись, описує коло.
Все сказане про обертове магнітне поле відноситься до випадку, коли обмотка статора складається з трьох котушок, зміщених у просторі на 120˚, що відповідає одній парі полюсів (р=1). Якщо збільшити число котушок в р разів, то кутова швидкість обертового магнітного поля буде в р разів меншою кутової частоти змінного струму, бо за період змінного струму Т вісь поля повернеться на кут  . Отже, в багатополюсному двигуні кутова швидкість магнітного поля
. Отже, в багатополюсному двигуні кутова швидкість магнітного поля
 , /16.6/
, /16.6/
де f – частота змінного струму.
Асинхронний двигун як і синхронний генератор складається із статора і ротора. Статор складається із сталевого або чавунного корпусу, в якому закріплене циліндричне осердя з пазами, зібране з тонких ізольованих листів електротехнічної сталі. На внутрішній поверхні циліндра, в пазах, розміщена трифазна обмотка, яка при живленні трифазною напругою створює обертове магнітне поле. Початки і кінці обмоток статора виведені на щиток. Якщо лінійна напруга в мережі  , то обмотки з’єднують зіркою, а коли
, то обмотки з’єднують зіркою, а коли  - то трикутником.
- то трикутником.
Ротор двигуна складається із осердя, зібраного як і статор із тонких листів електротехнічної сталі і закріпленого на валу, і обмотки, розміщеної в пазах. Обмотка короткозамкненого ротора представляє собою алюмінієві або мідні стержні, укладені в пази без ізоляції і з’єднані з торців кільцями накоротко. За зовнішнім виглядом обмотка нагадує „колесо білки”.
Принцип дії асинхронного двигуна полягає у тому, що струм у трифазній обмотці утворює магнітне поле, яке обертається відносно статора зі частотою  . Це магнітне поле індукує в обмотці ротора трифазну систему ЕРС, котра зумовлює протікання трифазного струму. Трифазний струм створює своє магнітне поле, яке обертається відносно ротора з кутовою швидкістю
. Це магнітне поле індукує в обмотці ротора трифазну систему ЕРС, котра зумовлює протікання трифазного струму. Трифазний струм створює своє магнітне поле, яке обертається відносно ротора з кутовою швидкістю
 , /16.7/
, /16.7/
де  - частота струму в роторі. Частота струму в роторі згідно /16.7/
- частота струму в роторі. Частота струму в роторі згідно /16.7/
 , /16.8/
, /16.8/
де  – кутова швидкість ротора;
– кутова швидкість ротора;  - ковзання. У просторі магнітне поле ротора буде рухатись зі швидкістю
- ковзання. У просторі магнітне поле ротора буде рухатись зі швидкістю
 , тобто магнітне поле, яке створюється струмом в обмотці ротора, обертається у просторі зі швидкістю магнітного поля статора. Однакова (синхронна) швидкість руху магнітних полів статора і ротора утворює електромагнітний момент, який обертає ротор.
, тобто магнітне поле, яке створюється струмом в обмотці ротора, обертається у просторі зі швидкістю магнітного поля статора. Однакова (синхронна) швидкість руху магнітних полів статора і ротора утворює електромагнітний момент, який обертає ротор.
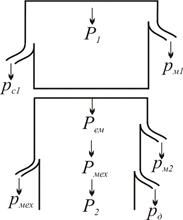 Будь-яке перетворення енергії одного виду в інший зв’язане з втратами. На рис. 16.6 наведена енергетична діаграма двигуна, на якій позначені:
Будь-яке перетворення енергії одного виду в інший зв’язане з втратами. На рис. 16.6 наведена енергетична діаграма двигуна, на якій позначені:
 - потужність, яку споживає двигун;
- потужність, яку споживає двигун;
 - електричні втрати в обмотці статора;
- електричні втрати в обмотці статора;
 - втрати потужності в осерді статора (на гістерезіс і перемагнічення);
- втрати потужності в осерді статора (на гістерезіс і перемагнічення);
 електро-
електро-
Рис.16.6 магнітна потужність ( - обертовий момент);
- обертовий момент);  - електричні втрати в обмотці ротора.
- електричні втрати в обмотці ротора.
Втратами потужності в осерді ротора, зазвичай, нехтують, бо вони пропорційні частоті струму в роторі, яка згідно з /16.8/ складає 1...3 Гц. Тому вважають, що механічна потужність, яку розвиває двигун,  . Звідки
. Звідки 
 . Отже, електричні втрати в обмотці ротора
. Отже, електричні втрати в обмотці ротора
 . /16.9/
. /16.9/
Окрім електричних витрат в роторі іще є такі втрати:
 - втрати потужності на тертя та охолодження;
- втрати потужності на тертя та охолодження;
 - додаткові втрати від дії вищих гармонік, зумовлених ступінчастим розподілом магнітної індукції у повітряному проміжку (рис.16.2). Вони створюють додатковий гальмівний момент, як і механічні втрати, і тому їх складають з механічними.
- додаткові втрати від дії вищих гармонік, зумовлених ступінчастим розподілом магнітної індукції у повітряному проміжку (рис.16.2). Вони створюють додатковий гальмівний момент, як і механічні втрати, і тому їх складають з механічними.
Корисна потужність
 /16.10/
/16.10/
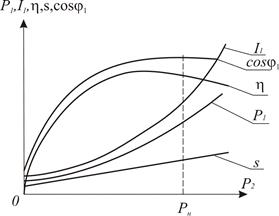
Експлуатаційні показники роботи асинхронних двигунів визначають його механічна та робочі характеристики. До них відносять залежності потужності Р1, струму статора І1, ковзання s, коефіцієнта корисної дії η і коефіцієнта потужності cosφ 1 від корисної потужності Р2. Характер цих залежностей можна вияснити за допомогою спрощеної схеми заміщення, яка наведена на рис. 16.7. На схемі позначено: Uф – фазна напруга живлення; І1 – фазний струм статора;  - зведений до обмотки статора струм ротора; х1 і
- зведений до обмотки статора струм ротора; х1 і  - реактивний опір обмотки статора і зведений до обмотки статора реактивний опір обмотки ротора; r1 і
- реактивний опір обмотки статора і зведений до обмотки статора реактивний опір обмотки ротора; r1 і  - активний і зведений опори обмоток статора і ротора;
- активний і зведений опори обмоток статора і ротора;  і
і  - активний і реактивний опори контура намагнічування (опори обмотки статора при холостому ході двигуна, тобто при
- активний і реактивний опори контура намагнічування (опори обмотки статора при холостому ході двигуна, тобто при  );
);  - струм контура намагнічування;
- струм контура намагнічування;  - ковзання.
- ковзання.
 Механічна характе-ристика асинхронного дви-гуна, як і будь-якого двигуна, представляє со-бою залежність швид- кості обертання від моменту
Механічна характе-ристика асинхронного дви-гуна, як і будь-якого двигуна, представляє со-бою залежність швид- кості обертання від моменту  . Знайти аналітичний вираз досить склад- Рис.16.7. но. Тому шукають залеж-
. Знайти аналітичний вираз досить склад- Рис.16.7. но. Тому шукають залеж-
ність моменту від ков- зання  , знаючи, що кутова швидкість двигуна
, знаючи, що кутова швидкість двигуна
 . /16.11/
. /16.11/
На підставі залежностей і  будують механічну характеристику двигуна.
будують механічну характеристику двигуна.
Момент, який розвиває асинхронний двигун можна визначити з /16.9/, замінивши дійсні величини на зведені:
 . /16.12/
. /16.12/
Заміна дійсних величин зведеними допустима, бо зведені величини визначають з умови рівності енергетичних показників зведеної і дійсної схеми.
У відповідності до схеми заміщення зведений струм ротора
 . /16.13/
. /16.13/
Підставивши значення  в /16.12/, одержимо
в /16.12/, одержимо
 . /16.14/
. /16.14/
Крива має два максимуми: один в генераторному режимі, коли  , другий – в режимі двигуна коли
, другий – в режимі двигуна коли  . Прирівнявши
. Прирівнявши  , визначають критичне значення
, визначають критичне значення  , при якому момент двигуна досягає максимального (критичного) значення Мк. Критичне ковзання
, при якому момент двигуна досягає максимального (критичного) значення Мк. Критичне ковзання
 . /16.15/
. /16.15/
Підставивши значення в /16.13/, знаходять вираз для визначення критичного моменту
 . /16.16/
. /16.16/
Знак „+” в рівностях /16.15/ і /16.16/ відноситься до рушійного і гальмівного противмиканням режимів, а знак „-” – до генераторного режиму роботи двигуна паралельно з мережею живлення. Бо в цьому режимі він споживає з мережі струм намагнічування.
Якщо вираз /16.14/ розділити на /16.16/, то після нескладних перетворень одержимо
 , /16.17/
, /16.17/
де  .
.
Із виразу /16.14/ видно, що момент двигуна пропорційний квадрату напруги, тобто момент двигуна дуже чутливий до коливань напруги в мережі. Так, при заданому ковзанні і зменшенні напруги на 10%  , момент зміниться на 19% (М=0.91Мном), що необхідно враховувати при виборі потужності двигунів.
, момент зміниться на 19% (М=0.91Мном), що необхідно враховувати при виборі потужності двигунів.
Критичне ковзання (формула 16.15) і швидкість ідеального холостого ходу (формула 16.6) не залежать від напруги.
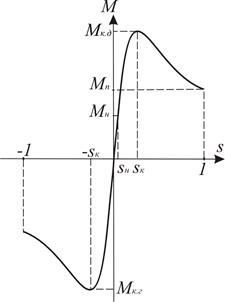 На рис. 16.8 наведена характеристика асинхронного двигуна, яка має такі характерні точки:
На рис. 16.8 наведена характеристика асинхронного двигуна, яка має такі характерні точки:
 ;
;  , при цьому швидкість двигуна дорівнює синхронній;
, при цьому швидкість двигуна дорівнює синхронній;
 ;
;  , що відповідає номінальному ковзанню і номінальному моменту;
, що відповідає номінальному ковзанню і номінальному моменту;
 ;
;  - критичне ковзання і максимальний момент в рушійному режимі роботи двигуна;
- критичне ковзання і максимальний момент в рушійному режимі роботи двигуна;
 ;
;  - початковий пусковий момент;
- початковий пусковий момент;
 ;
;  - макси-
- макси-
мальний момент в генераторно-
Рис.16.8. му режимі роботи двигуна. При  двигун працює в режимі гальмування противмиканням.
двигун працює в режимі гальмування противмиканням.
При  має місце генераторний режим роботи двигуна паралельно з мережею.
має місце генераторний режим роботи двигуна паралельно з мережею.
Якщо в рівнянні /16.17/ знехтувати активним опором обмотки статора, то отримаємо формулу, якою практично користуються при розрахунках:
 . /16.18/
. /16.18/
Підставивши в /16.18/ замість змінних значень М і s їх номінальні значення sн і Мн та позначивши  , одержимо
, одержимо
 . /16.19/
. /16.19/
На рис. 16.9 наведена механічна характеристика двигуна, ротор якого має круглі пази. Ділянка характеристики від до  відповідає рівнянню /16.18/. На ділянці від
відповідає рівнянню /16.18/. На ділянці від  до 0 дійсні значення моменту (крива 1) значно відрізняються від розрахункових (крива 2). Відношення пускового моменту до номінального
до 0 дійсні значення моменту (крива 1) значно відрізняються від розрахункових (крива 2). Відношення пускового моменту до номінального  знаходиться в межах 1, 2...2, при цьому більше відношення характерне для двигунів малої потужності.
знаходиться в межах 1, 2...2, при цьому більше відношення характерне для двигунів малої потужності.
Щоб збільшити пусковий
 момент випускають асинх-
момент випускають асинх-
ронні двигуни спеціального призначення, ротори яких виготовляють з подвійними круглими пазами або з тонкими довгими пазами. Це призводить до збільшення пускового моменту, але при низькій швидкості момент двигуна стає меншим за пусковий (крива 3 на рис. 16.9), що зумовлено
Рис.16.9 впливом вищих гармонік із-за
насичення сталі в зоні зубців
ротора. Такі двигуни мають нижчі коефіцієнти корисної дії і потужності.
Робочі характеристики двигуна середньої потужності наведені на рис. 16.10. Їх характер пояснюється наступним. Залежність струму статора від навантаження  нелінійна. При Р2=0 струм статора визначається, в основному, струмом намагнічування. При збільшенні навантаження збільшуються ковзання, ЕРС обмотки ротора і, як наслідок, зростає струм ротора, що слідує з формули /16.13/. Це зростання не є пропорційним, бо одночасно змінюється і реактивний опір обмотки ротора
нелінійна. При Р2=0 струм статора визначається, в основному, струмом намагнічування. При збільшенні навантаження збільшуються ковзання, ЕРС обмотки ротора і, як наслідок, зростає струм ротора, що слідує з формули /16.13/. Це зростання не є пропорційним, бо одночасно змінюється і реактивний опір обмотки ротора  , де
, де  - індуктивність обмотки.
- індуктивність обмотки.
 Залежність
Залежність  має дві характерні точ-ки: при
має дві характерні точ-ки: при  ковзання
ковзання  визначає момент холостого ходу двигуна Мх; при Р2=Рн s=sн. Між цими точками ковзання змінюється за законом, близьким до лінійного, бо
визначає момент холостого ходу двигуна Мх; при Р2=Рн s=sн. Між цими точками ковзання змінюється за законом, близьким до лінійного, бо 
де  - залежність Рис. 16.10. моменту двигуна від ковзання (формула16.17).
- залежність Рис. 16.10. моменту двигуна від ковзання (формула16.17).
Робоча характеристика  виражає залежність між корисною потужністю і потужністю, яку споживає двигун, тобто показує, яка частина повної потужності перетворюється в механічну потужність. Це перетворення залежить від фазового зсуву між напругою і струмом статора. Фазовий зсув визначає також потужність, яка йде на створення електромагнітного поля. Асинхронний двигун, як і трансформатор, споживає із мережі струм І0, який йде на створення основного магнітного потоку і який відстає від напруги на кут
виражає залежність між корисною потужністю і потужністю, яку споживає двигун, тобто показує, яка частина повної потужності перетворюється в механічну потужність. Це перетворення залежить від фазового зсуву між напругою і струмом статора. Фазовий зсув визначає також потужність, яка йде на створення електромагнітного поля. Асинхронний двигун, як і трансформатор, споживає із мережі струм І0, який йде на створення основного магнітного потоку і який відстає від напруги на кут  , близький до π /2. Тому при холостому ході
, близький до π /2. Тому при холостому ході  . При збільшенні навантаження збільшуються активні складові струмів ротора і статора, що призводить до різкого збільшення
. При збільшенні навантаження збільшуються активні складові струмів ротора і статора, що призводить до різкого збільшення  . Максимального значення досягає при
. Максимального значення досягає при  . При подальшому збільшенні Р2 величина починає зменшуватись. Це зумовлене збільшенням ковзання, а значить і реактивного опору обмотки ротора, а значить, і фазового зсуву
. При подальшому збільшенні Р2 величина починає зменшуватись. Це зумовлене збільшенням ковзання, а значить і реактивного опору обмотки ротора, а значить, і фазового зсуву  . Зі збільшенням збільшується і
. Зі збільшенням збільшується і  , а
, а  буде зменшуватись. Для асинхронних двигунів номінальний
буде зменшуватись. Для асинхронних двигунів номінальний  . Менша цифра відноситься до двигунів малої потужності.
. Менша цифра відноситься до двигунів малої потужності.
Характер робочої характеристики  пояснюється наступним. Коефіцієнт корисної дії
пояснюється наступним. Коефіцієнт корисної дії
 . /16.20/
. /16.20/
Втрати потужності  згідно з /16.10/ складається із постійних втрат і змінних, які пропорційні квадрату струму і які залежать від навантаження. При холостому ході переважають втрати в сталі, бо
згідно з /16.10/ складається із постійних втрат і змінних, які пропорційні квадрату струму і які залежать від навантаження. При холостому ході переважають втрати в сталі, бо  і І1 дорівнює струму холостого ходу, який близький до струму намагнічування І0. Зі збільшенням Р2 змінні втрати (втрати в міді обмоток
і І1 дорівнює струму холостого ходу, який близький до струму намагнічування І0. Зі збільшенням Р2 змінні втрати (втрати в міді обмоток  і
і  ) зростають і коли вони досягнуть постійних втрат, ККД буде максимальним. При подальшому зростанні Р2 змінні втрати збільшуються, що призводить до значного зменшення ККД. Коефіцієнт корисної дії асинхронних двигунів досить високий і знаходиться в межах 0, 7...0, 96 в залежності від потужності: двигуни великої потужності мають вищий ККД.
) зростають і коли вони досягнуть постійних втрат, ККД буде максимальним. При подальшому зростанні Р2 змінні втрати збільшуються, що призводить до значного зменшення ККД. Коефіцієнт корисної дії асинхронних двигунів досить високий і знаходиться в межах 0, 7...0, 96 в залежності від потужності: двигуни великої потужності мають вищий ККД.
Вид робочої характеристики  визначає те, що
визначає те, що  . Оскільки залежність спочатку різко зростає, досягає максимуму, а потім знижується, то крива спочатку піднімається поступово, а потім - більш швидко, наближаючись до прямої лінії.
. Оскільки залежність спочатку різко зростає, досягає максимуму, а потім знижується, то крива спочатку піднімається поступово, а потім - більш швидко, наближаючись до прямої лінії.
Важливою характеристикою асинхронних двигунів є пусковий струм, величина якого в залежності від потужності і форми пазів обмотки ротора більша номінального в 4...7 разів. Це зумовлено тим, що в момент пуску в обмотці ротора індукується максимальна ЕРС  , бо її провідники перетинаються магнітним потоком статора з максимальною швидкістю, рівною
, бо її провідники перетинаються магнітним потоком статора з максимальною швидкістю, рівною  . Максимальна ЕРС спричиняє максимальний струм в обмотці ротора і відповідно – максимальний (пусковий) струм в обмотці статора. Після пуску ЕРС ротора
. Максимальна ЕРС спричиняє максимальний струм в обмотці ротора і відповідно – максимальний (пусковий) струм в обмотці статора. Після пуску ЕРС ротора  буде зменшуватись, зменшуватись будуть і струми в обмотках ротора і статора до значення, яке відповідатиме рівності моменту двигуна моменту сил опору механізму, який приводиться в рух.
буде зменшуватись, зменшуватись будуть і струми в обмотках ротора і статора до значення, яке відповідатиме рівності моменту двигуна моменту сил опору механізму, який приводиться в рух.
|
|