Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Регулирование скорости электродвигателя постоянного тока
|
|
В электроприводах постоянного тока скорость регулируется тремя способами:
1) напряжением U на якоре;
2) изменением магнитного поля Ф возбуждения;
3) включение добавочных резисторов Rдоб в цепь якоря.
Эти возможности вытекают из уравнения механической характеристики ДПТ постоянного тока независимого возбуждения:
 . (6.6)
. (6.6)
Первый способ может быть реализован только при уменьшении напряжения ниже номинального. Он обеспечивает следующие показатели регулирования:
1) диапазон (8 - 10): 1 в разомкнутых системах и более 1000 – в замкнутых системах регулирования;
2) плавность регулирования высокая;
3) направление регулирования – вниз от естественной характеристики;
4) стабильность характеристик соответствует естественной характеристики (в замкнутых системах регулирования);
5) экономичность регулирования высокая;
6) допустимый момент при регулировании постоянный (рисунок 6.2).
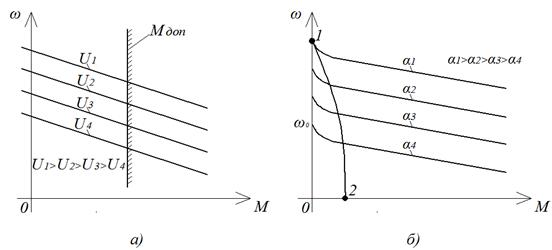
Рисунок 6.2. Механические характеристики ДПТ постоянного тока независимого возбуждения при регулировании напряжения на якоре (а) и те же характеристики при питании якоря тиристорного управляемого выпрямителя (б): α – угол открытия тиристора; линия 1 – 2 граница прерывистых токов.
При питании якоря от тиристорного управляемого выпрямителя механические характеристики имеют меньшую жесткость за счет большего падения напряжения в цепи якоря. При малых моментах наступает режим прерывистых токов, при котором имеет место резкий подъем характеристик (рисунок 6.2 б). Чем больше угол включения α тиристора, тем больше зона прерывистых токов.
Для реализации этого способа регулирования используются тиристорные управляемые выпрямители (рисунок 6.3).
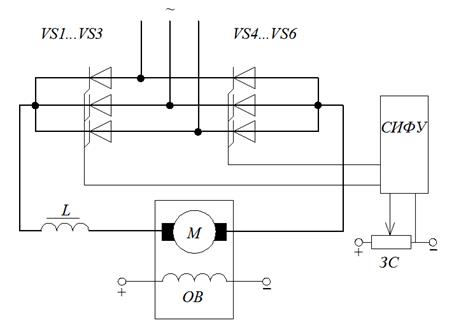
Рисунок 6.3. Схема тиристорного управляемого выпрямителя: L – дроссель реактор); СИФУ – система импульсно фазового управления тиристорами VS1 – VS6; ЗС – задатчик скорости.
Второй способ может быть реализован только при уменьшении магнитного поля Ф относительно номинального значения Фн. Из уравнения (6.6) видно, что скорость вращения при этом будет возрастать. Он обеспечивает следующий показатель:
1) диапазон до двух в обычных двигателях и до 8 – специальных двигателях;
2) плавность высокая;
3) направления регулирования скорости - вверх от естественной характеристики;
4) стабильность характеристик с уменьшением потока уменьшается;
5) экономичность высокая;
6) допустимая мощность Р=const (момент уменьшается с ростом скорости).
Механическая характеристика изображена на рисунке 6.4:
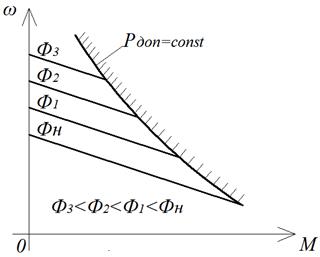
Рисунок 6.4. Механические характеристики ДПТ постоянного тока независимого возбуждения при регулировании скорости изменения магнитного потока.
В современных приводах способ реализуется путем использования однофазного тиристорного регулятора для обмотки возбуждения или выпрямителя с переменным резистором (для малых двигателей).
Обратите внимание, что манипуляции с током возбуждения опасны. При обрыве цепи возбуждения (Ф=0) и в соответствии с уравнением 6.1 скорость двигателя стремится в бесконечность. Реально она стремится увеличится в 3 – 5 раз, ЭДС якоря пропадает и ток резко увеличивается. Это аварийный режим для двигателя. Чтобы избежать этого, в цепь обмотки возбуждения включают токовое реле минимального тока, которое при исчезновении тока возбуждения отключит силовой контактор и при образователь будет отключен от сети.
Третий способ самый простой и древний. Он реализуется путем включения в цепь якорь добавочных резисторов. При этом используются контакторы или контроллеры управления с регулировочными реостатами.
Этот способ обеспечивает следующие показатели регулирования:
1) диапазон – 2, 5: 1;
2) регулирование ступенчатое;
3) направление изменения скорости – вниз от естественной, при этом все характеристики выходят из одной точки ω 0;
4) стабильность характеристик уменьшается;
5) экономичность низкая, потому что на добавочном резисторе потери мощности  ;
;
6) допустимый момент постоянный (рисунок 6.5).
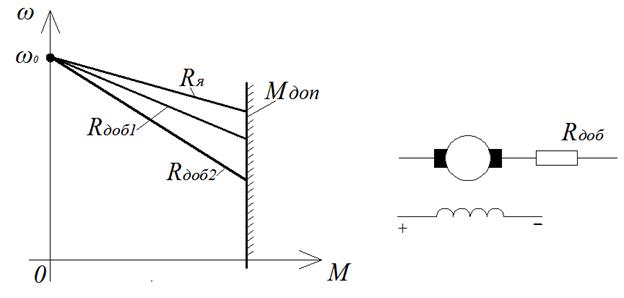
Рисунок 6.5. Механические характеристики ДПТ независимого возбуждения при регулировании скорости включением добавочных резисторов в цепь якоря.
Выводы:
1) наилучший способ регулирования скорости ДПТ – изменения напряжения на якоре;
2) наихудший способ – включения добавочных резисторов в цепь якоря. Его можно использовать только для кратковременного снижения скорости;
3) способ регулирования скорости изменением магнитного потока встречается редко. Его используют для расширения диапазона регулирования электропривода вверх при двух зонном регулировании (вниз и вверх от естественной).
Двигатели постоянного тока последовательного возбуждения подвержены тем же способом регулирования скорости рассмотренным выше, но имеются следующие особенности:
1) включение резисторов в цепь якоря ДПТ последовательного возбуждения, несмотря на потери мощности, широко используются в крановых и тяговых установках;
2) регулирование возбуждения осуществляется путем шунтирования обмотки возбуждения резистором, при этом поток Ф уменьшается, а скорость растет;
3) для снижения скорости вращения можно шунтировать обмотку якоря резистором;
4) в некоторых транспортных установках используются два одинаковых двигателя последовательного возбуждения. Переключая их с последовательного соединения на параллельное и используя два добавочных резистора, можно получить пять различных скоростей вращения, не изменяя регуляторы напряжения. В простых транспортных установках (электрокарах) этот способ используется.
|
|