Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Для новых пользователей первый месяц бесплатно. Чат-бот для мастеров и специалистов, который упрощает ведение записей: — Сам записывает клиентов и напоминает им о визите;
— Персонализирует скидки, чаевые, кэшбэк и предоплаты;
— Увеличивает доходимость и помогает больше зарабатывать; Начать пользоваться сервисом

Ознакомление с модулем labview Robotics
|
|
Методические указания к лабораторным работам
Часть 1
Составители: Е.Д. Баран, старший преподаватель
Ж.С. Першина, ассистент
Работа подготовлена на кафедре систем сбора и обработки данных
Новосибирский государственный технический университет, 2015 г.
ЛАБОРАТОРНАЯ РАБОТА №1
ОЗНАКОМЛЕНИЕ С МОДУЛЕМ LABVIEW ROBOTICS
1. Цель работы
Ознакомление с возможностями проектирования и разработки систем управления мобильного робота на базе платформы NI Robotics Starter Kit 2.0 в среде LabVIEW, основными библиотеками LabVIEW Robotics Module и освоение процедуры создания и отладки проекта.
2. Краткие теоретические сведения
LabVIEW Robotics Module является интегрированной средой комплексного проектирования и разработки систем управления мобильными роботами (МР). Данный модуль включает библиотеку драйверов для устройств различного класса МР (манипуляторы, колесные роботы) и высокоуровневых функций для реализации процедур сбора и обработки данных, принятия решений и управления исполнительными механизмами.
Основные функциональные блоки МР проиллюстрированы на рис. 2.1.
| Оценка ситуации Планирование поведения |
| Формирование управляющих сигналов |
| Сбор данных Комплексирование данных Обработка данных |
Рис. 2.1. Обобщенная функциональная схема МР
NI Robotics Starter Kit 2.0 позволяет изучать основные компоненты МР (сенсоры, двигатели, контроллеры и т.п.) и решать ряд практических задач:
- сканирования и картографирования местности;
- объезда препятствий;
- планирования траектории движения;
- сопровождение движущегося объекта.
Аппаратная часть платформы NI Robotics Starter Kit 2.0 представляет собой универсальный набор элементов для сборки мобильных роботов различной степени сложности и функциональности. Она содержит легко монтируемые механические компоненты, электроприводы, модули управления, различные типы датчиков. Общий вид Robotics Starter Kit 2.0 представлен на рис. 2.2.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
Рис. 2.2. Общий вид NI Robotics Starter Kit 2.0: 1 - TETRIX платформа;
2 - ультразвуковой датчик расстояния Parallax PING))); 3 - сервопривод; 4 - плата управления на базе NI sbRIO 9632; 5 - двигатели постоянного тока; 6 - оптические квадратурные энкодеры; 7 - аккумулятор; 8 - омни-колеса
Базовая комплектация системы состоит из компонентов, технические характеристики которых представлены в таблице 2.1. При этом имеется возможность расширения функций системы за счет дополнительных модулей сбора данных с датчиков, GPS-приемника, GSM-передатчика и блока обработки видеоизображений с видеокамеры.
Таблица 2.1. Базовая комплектация робототехнической платформы Robotics Starter Kit 2.0
| Наименование | Технические характеристики |
| Ультразвуковой сканер | · диапазон измерения дальности: 0, 02-2 м · диапазон сканирования: 0-180° · шаг сканирования: 1° |
| Электроприводы постоянного тока | · напряжение питания: 12 В · крутящий момент: 3348 г/см · обороты в минуту: 152 |
| NI sbRIO-9632 | · сетевой интерфейс: Ethernet · тактовая частота процессора: 400 МГц · память: 256 Мб · FPGA: Xilinx Spartan-3 · каналы цифрового ввода-вывода: 110 · каналы аналогового ввода: 32 · каналы аналогового вывода: 4 |
NI sbRIO-9632 (рис. 2.3) представляет OEM (Original equipment manufacturer) решение для создания встраиваемых систем сбора данных, мониторинга и управления. Открытая архитектура, функциональная гибкость, компактность и низкая стоимость повышает эффективность использования NI sbRIO-9632 в разработке МР.
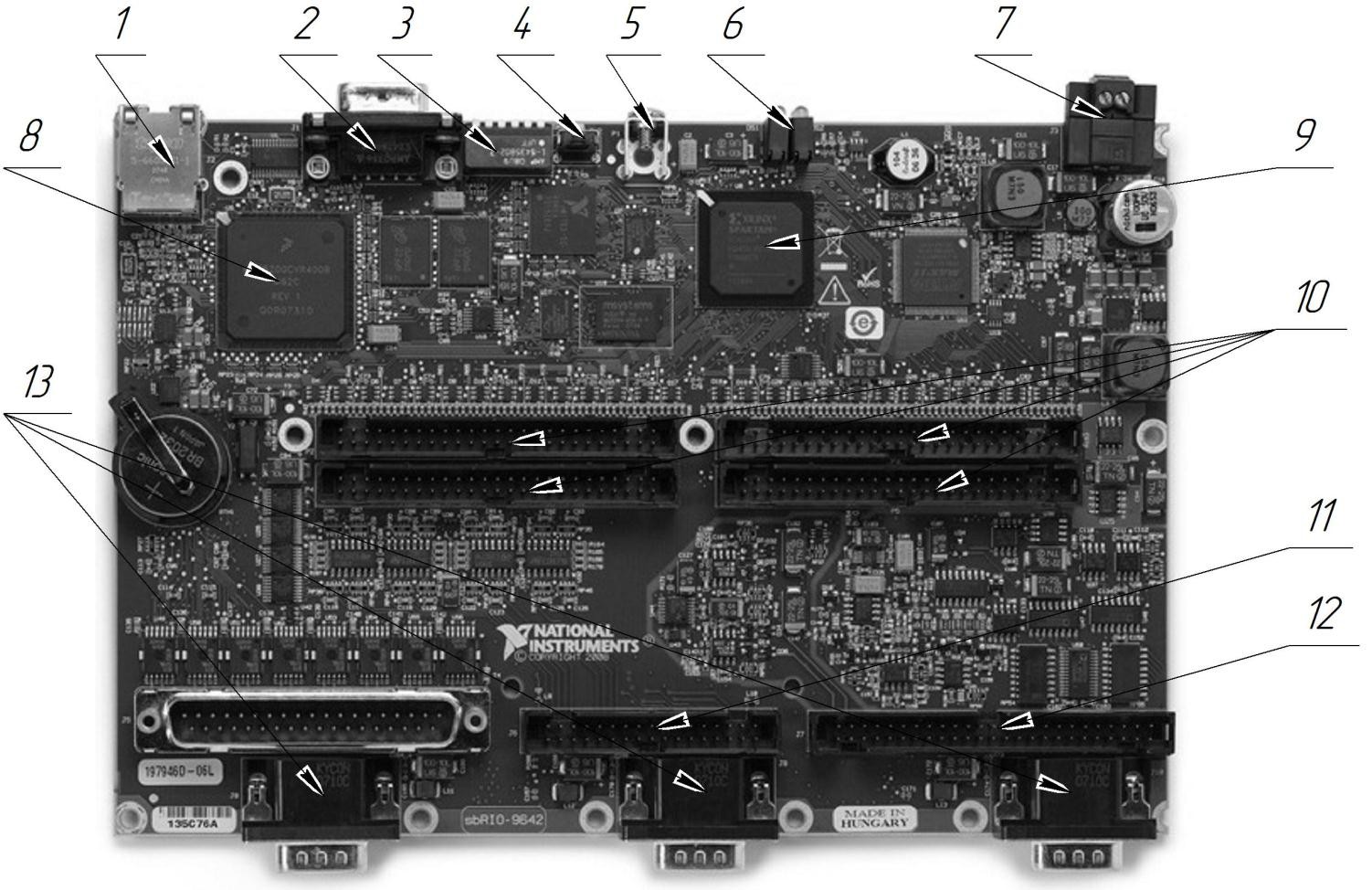
Рис. 2.3. Общий вид печатной платы sbRIO-9632:
1 - порт Ethernet RJ-45; 2 - последовательный порт RS-232; 3 - DIP переключатели; 4 - кнопка Reset; 5 - ушко заземления; 6 - светодиодные индикаторы; 7 - разъем питания; 8 - процессор реального времени; 9 - микросхема ПЛИС; 10 - цифровой ввод/вывод 3, 3 В; 11 - цифровой ввод 24В; 12 - разъем аналоговых входов/выходов; 13 - коннектор для модулей
3. Методические указания
3.1. Создание нового проекта для моделирования алгоритмов управления МР может осуществляться несколькими способами. Рассмотрим основной из них.
При запуске модуля LabVIEW Robotics в главном меню во вкладке File необходимо выбрать New…. Далее в открывшемся окне выполнить выбор Robotics Project и нажать кнопку OK. В окне Create New LabVIEW Robotics Projeсt выбрать Robotics Environment Simulator и нажать кнопку NEXT.
3.2. В появившемся окне Robotics Environment Simulator Wizard необходимо определить среду функционирования МР путем выбора во вкладке Environment её типа (городская автомобильная дорога, местность с пересеченным рельефом, лабиринт и т.п.) и выполнить настройку свойств (географические координаты, значение силы притяжения, высота над землей, тип подстилающей поверхности рельефа).
Во вкладке Obstacle имеется возможность добавления дополнительных препятствий в моделируемую среду. Стандартный набор препятствий представлен трехмерными геометрическими примитивами (сфера, цилиндр, куб) с возможностью задания их параметров и свойств (масса, материал, координаты, цвет и т.д.). Для того чтобы разместить новое препятствие необходимо выбрать из списка Model List тип препятствия и посредством захвата курсора мыши перенести объект в требуемое место. Удаление осуществляется выделением препятствия и нажатие клавиши < Delete>.
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
Определение типа МР (Starter Kit 2.0, KUKA youbot, Super Droid SD6 и т.д.) и его размещения в моделируемой среде выполняется во вкладке Robot процедурой переноса, аналогичной процедуре добавления препятствий. Таким же способом во вкладке Sensor осуществляется расширение сенсорного обеспечения МР.
3.3. Визуализация модели МР и среды функционирования в 3D формате осуществляется в окне Simulation Scene.
Навигация в области визуализации выполняется наведением курсора на область масштабирования, одновременным нажатием клавиши < Ctrl> и левой кнопки мыши, с последующим перемещением мыши по вертикали вверх, вниз, влево, вправо.
Масштабирование 3D модели выполняется наведением курсора на область масштабирования, одновременным нажатием клавиши < Shift> и левой кнопки мыши, с последующим перемещением мыши по вертикали вверх для увеличение модели и вниз для ее уменьшения.
3.4. Сохранение созданной модели выполняется нажатием кнопки NEXT, выбором необходимой директории и завершается нажатием кнопки SAVE.
4. Порядок выполнения работы
4.1. Создайте проект для моделирования алгоритмов управления МР в среде Robotics Environment Simulator.
4.2. Используя Robotics Environment Simulator Wizard, выполните выбор типа и модели МР, сенсорного обеспечения, также произведите настройки конфигурации среды функционирования.
4.3. Сохраните настройки конфигурации модели.
4.4. Откройте проект. Изучите его структуру.
4.5. Ознакомьтесь с содержимым файлов конфигурации МР Robotics Environment Simulator ID List.txt и среды функционирования Robotics Environment Simulator.xml.
4.6. Откройте главный VI. В рабочей области блок-диаграммы откройте палитру функции Robotics и ознакомьтесь с её подпалитрами.
4.7. Используя Help, самостоятельно изучите функции подпалитры Simulator, функцию управления моторами Write DC motor в подпалитре Starter Kit 2.0.
4.8. Разработайте программу ручного управления движением Starter Kit 2.0, используя элементы управления (числовой индикатор, бегунок) на лицевой панели.
4.9. Самостоятельно изучите функции для работы с периферийными устройствами ввода (клавиатура, мышь) в подпалитре Input Device.
4.10. Модифицируйте программу, дополнив функцией управления движением по нажатию на клавиатуре клавиш < Up> и < Down>.
4.11. Выполните отладку и тестирование разработанной программы в режиме моделирования.
4.12. Используя Help, самостоятельно изучите функцию управления моторами Write DC motor в подпалитре Starter Kit 2.0.
4.13. Модифицируйте программу для исполнения на вычислительном устройстве МР.
4.14. Выполните отладку и тестирование разработанного проекта на реальном оборудовании.
5. Содержание отчета
5.1. Титульный лист.
5.2. Цель работы.
5.3. Описание внешней среды, её параметров.
5.4. Описание МР с указание основных технических характеристик.
5.5. Описание конфигурации МР.
5.6. Листинги программ.
5.7. Тестовый пример.
5.8. Выводы.
6. Контрольные вопросы
6.1. Какие типы и модели МР имеются в среде Robotics Environment Simulator?
6.2. Какие типы сенсоров доступны при конфигурировании модели МР?
6.3. Какие типы среды функционирования МР имеются в Robotics Environment Simulator?
6.4. Перечислите основные свойства этих сред.
6.5. Какие параметрами обладают препятствия в Robotics Environment Simulator?
6.6. Опишите структуру проекта.
6.7. Перечислите параметры конфигурации МР.
6.8. Объясните назначение функции Write DC motor.
6.9. Оцените результаты.
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1. Баран Е.Д. LabVIEW FPGA. Реконфигурируемые измерительные и управляющие системы / Е.Д. Баран // М.: ДМК Пресс. – 2014. – 448 с.
2. Берштейн Л.С. Планирование поведения интеллектуального робота / Л.С. Берштейн, В.Б. Мелехин // – М.: Энергоатомиздат, 1994. – 240 с.
3. Интеллектуальные роботы: учебное пособие для вузов / под общ. ред. Е.И. Юревича, И.А. Каляев, В.М. Лохин, И.М. Макаров // М.: Машиностроение. – 2007. – 360 с.
4. Нильсон, Нильс. Искусственный интеллект. Методы поиска решений / под ред. С.В.Фомина // М.: Издательство «Мир». – 1973. – 270 с.
5. Рассел, Стюарт. Искусственный интеллект: современный подход / С. Рассел, П. Норвиг / М.: Издательский дом «Вильямс». – 2007. – 2-е изд. – 1408 с.
6. Тревис, Дж. LabVIEW для всех: [пер. с англ. Н. А. Клушин] / Дж. Тревис // М.: ДМК Пресс. – 2005. – 544 с.
7. Яковлев К.С. HGA*: эффективный алгоритм планирование траектории на плоскости/ К.С. Яковлев // Искусственный интеллект и принятие решений. – 2010. – 16-25 с.
8. Юревич Е.И. Сенсорные системы в робототехнике / Е.И. Юревич // СПб: Издательство политехнического университета. – 2013. – 100 с.
|
|