Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Вольтметры с времяимпульсным преобразованием
|
|
В основе принципа действия вольтметра времяимпульсного (временного) типа лежит преобразование с помощью АЦП измеряемого напряжения в пропорциональный интервал времени, который заполняют счетными импульсами, следующими с известной стабильной частотой следования. В результате такого преобразования дискретный сигнал измерительной информации на выходе преобразователя имеет вид пачки счетных импульсов, число которых пропорционально уровню измеряемого напряжения.
Существует несколько схемотехнических решений, используемых при создании времяимпульсных вольтметров. Рассмотрим две такие схемы.
Времяимпулъсный вольтметр с генератором линейно изменяющегося напряжения. Структурная схема времяимпульсного цифрового вольтметра и временные диаграммы, поясняющие ее работу, представлены на рис. 7.6. Данный тип вольтметра включает АЦП с промежуточным преобразованием измеряемого напряжения в пропорциональный интервал времени. В состав АЦП входят: генератор линейно изменяющегося напряжения ГЛИН; два устройства сравнения I и II; триггер Т; логическая схема И; генератор счетных импульсов; счетчик импульсов и цифровое отсчетное устройство.
Дискретный сигнал измерительной информации на выходе преобразователя имеет вид пачки счетных импульсов, число которых N пропорционально величине входного напряжения U'x (т.е. Ux). Линейно изменяющееся во времени напряжение Uглин с ГЛИН поступает на входы 1 обоих устройств сравнения. Другой вход устройства сравнения I соединен с корпусом.
В момент времени, когда на входе устройства сравнения I напряжение Uглин= 0, на его выходе возникает импульс UycI, условно фиксирующий нулевой уровень входного сигнала. Этот импульс, подаваемый на единичный вход триггера Т, вызывает появление положительного напряжения на его выходе. Возвращается триггер в исходное состояние импульсом UусII, поступающим с выхода устройства сравнения II. Импульс UусIIвозникает в момент равенства измеряемого U'x и линейно изменяющегося напряжения Uглин- Сформированный на выходе триггера импульс UТ длительностью Δ t = U'XS (здесь S — коэффициент преобразования) подается на вход схемы И, на второй вход которой поступает сигнал Uгси с генератора счетных импульсов, следующих с частотой ƒ 0 = 1/Т0.
 |
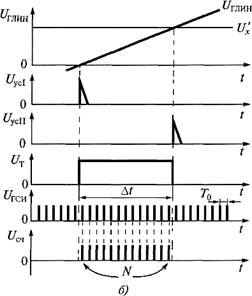 |
Рис. 3.13. Цифровой вольтметр с времяимпульсным преобразованием:
а — структурная схема; б — временные диаграммы
На выходе схемы И сигнал UC4 появляется только при наличии импульсов UT и UГСИ на обоих ее входах, т.е. счетные импульсы проходят через схему И тогда, когда присутствует сигнал на выходе триггера. Количество прошедших через схему И счетных импульсов N «At/T0 подсчитывается счетчиком и отображается на индикаторе ЦОУ прибора.
Из двух последних формул находим измеряемое напряжение:
U'x=N/(f0S)..
В данном вольтметре значение f0S выбирается равным 1 0т, где т = 1, 2, 3,..., (число т определяет положение запятой в цифровом отсчете) поэтому прибор непосредственно показывает значение измеряемого напряжения.
Рассмотренный цикл работы цифрового вольтметра периодически повторяется. При этом возврат ГЛИН в исходное состояние и подготовка схемы к очередному измерению осуществляется автоматически. По такому же принципу строятся цифровые вольтметры переменного тока. В этих вольтметрах напряжение переменного тока предварительно выпрямляется и далее подается на устройство сравнения П.
Соотношение U'x=N/(f0S). не учитывает погрешности дискретности из-за несовпадения момента появления счетных импульсов с началом и концом интервала Δ t. Однако еще большую погрешность вносит фактор нелинейности коэффициента преобразования S. Недостатком метода времяимпульсного преобразования является также его невысокая помехоустойчивость. Шумовая помеха, наложенная на измеряемое напряжение Ux, изменяет его и, следовательно, меняет момент появления импульса UycII, определяющего длительность Δ t времени счета. Поэтому вольтметры, построенные по этой схеме, наименее точные в ряду цифровых.
В АЦП многотактного интегрирования, входной сигнал интегрируется либо непрерывно, либо на определенном временном интервале, длительность которого обычно выбирается кратной периоду помехи. Это позволяет во многих случаях подавить помеху еще на этапе преобразования. Платой за это является пониженное быстродействие интегрирующих АЦП.
АЦП многотактного интегрирования были изобретены более 40 лет назад и сразу же стали основой для цифровых вольтметров высокой точности. Прорывом в этой области техники стала разработка в середине 70-х годов прошлого века Л. Эвансом и Д. Бингемом (США) АЦП двухтактного интегрирования ICL7106 (отечественный аналог — 572ПВ2), который и сегодня выпускается многими фирмами. Варианты этого АЦП являются «мозгом» современных цифровых мультиметров. Наибольшее распространение из время-импульсных методов, реализуемых в АЦП, нашли различные варианты метода двойного интегрирования, обеспечивающего измерение среднего (за интервал интегрирования) значения Ux. Распространение этого метода обусловлено его очевидными достоинствами: возможностью подавления напряжения помех, получением высокой точности при относительной простоте схемы, возможностью полной реализации на ИМС.
В АЦП двойного интегрирования преобразование Ux в пропорциональный ему временной интервал Тх осуществляется путем интегрирования сначала измеряемого Ux, а затем опорного Uon напряжений. В первом такте в течение времени Ти производится интегрирование входного напряжения Ux, в результате чего напряжение на выходе интегратора
 |
где RC — постоянная времени интегратора; t — независимая переменная величина (время).
В конце интервала интегрирования напряжение на выходе интегратора U1(Т1)=UxТи/RC.
В течение второго такта интегрируется опорное напряжение Uon, имеющее противоположную по отношению к Ux полярность. Интегрирование опорного напряжения продолжается до тех пор, пока выходное напряжение интегратора снова не станет равным нулю. Поэтому в течение времени второго такта напряжение на выходе интегратора
 |
откуда Тх= UхTи/Uon. Преобразование временного интервала Тх в эквивалентное число импульсов Nx осуществляется путем заполнения Тх импульсами генератора опорной частоты и подсчета их числа счетчиком: Nx= UxTHfon (fon — частота генератора опорной частоты).
Интервал интегрирования Ти формируется обычно путем заполнения счетчика импульсами от генератора опорной частоты и равен в этом случае Ти = N/fon (N — емкость счетчика), тогда NX=UXN/Uon.
Из уравнения Тх= F(Uх) видно, что временной интервал Тх, пропорциональный Ux, не зависит от постоянной времени интегратора RC, а зависит от значений Uon и Ти, которые могут поддерживаться постоянными с высокой точностью. В этом основное преимущество метода двойного интегрирования. Достоинством метода является также то, что значение Nx не зависит от начального напряжения интегратора и долговременной нестабильности Ти и Uon.
 |
Структурная схема ЦИП с применением АЦП, основанного на методе двойного интегрирования, приведена на рис. 8.3, а временные диаграммы, поясняющие его работу, — на рис. 8.4. После запуска устройства управления (момент t1) на счетчик и запоминающее устройство подается сигнал, устанавливающий их в исходное (нулевое) состояние. В момент t2 с устройства управления подается сигнал, который ключ Кл2 размыкает, а ключ Кл1 уста навливает в положение 1, когда на вход интегратора подается Ux, например U1,. Ключ Кл1 находится в положении 1 в течение времени Tи, при этом напряжение на выходе интегратора Uинт возрастает до значения U1’ (первый такт работы прибора). Интервал интегрирования Ти формируется следующим образом. В момент t2 на один из входов схемы И с устройства управления подается сигнал, по которому с выхода схемы И на вход счетчика подаются импульсы с генератора опорной частоты, подаваемые на второй вход схемы И. Счет этих импульсов идет до полного заполнения счетчика. На рис. 8.3 счетчик имеет четыре декады, следовательно, счет идет до 104 импульсов. После того как в счетчике зафиксируется 9999 импульсов, следующий (десятитысячный) импульс возвращает его в исходное состояние и с последней декады на устройство управления подается сигнал переполнения, по которому ключ Кл1 устанавливается в положение 2.
В течение интервала Ти состояние счетчика не переносится в запоминающее устройство и не индицируется на цифровом индикаторе.
Интервал интегрирования Тинт = NT0 = N/f0 (N — емкость счетчика) формируется числом импульсов генератора опорной частоты f0, и его постоянство определяется стабильностью генератора.
Когда ключ Кл1 переключится в положение 2 (момент t 3), на вход интегратора будет подаваться опорное напряжение Uon с полярностью, противоположной Ux (определяется положением ключа Кл3). Начинается второй такт работы прибора, когда напряжение на выходе интегратора начинает уменьшаться от значения U1’ до нуля (момент t4). Состояние Uинт = О определяет устройство сравнения (компаратор), которое в этот момент выдает импульс в устройство управления. Устройство управления снимает сигнал со схемы И, и импульсы с генератора опорной частоты на счетчик не подаются. Число импульсов Nx, подсчитанное счетчиком в интервале Тх = t4 - t3, пропорционально Ux. Оно фиксируется в запоминающем устройстве и индицируется на цифровом индикаторе до прихода следующего импульса запуска.
На рис. 8.4 показано, как изменяются напряжение на выходе интегратора и временной интервал Тх для различных значений Ux. Угол наклона графика интегрирования α при разряде постоянен, так как напряжение на входе и постоянная времени интегратора в процессе измерения не меняются, это и дает возможность получить время разряда интегратора Тх, пропорциональное Ux.
Цифровые вольтметры (ЦВ) имеют низкий порог реагирования обычно (10 или 1 мкВ), поэтому очень важно, чтобы результат измерения мало зависел от помех и наводок во входной цепи ЦВ, уровень которых часто значительно больше порога реагирования ЦВ.
В ЦВ на основе двухтактного интегрирования эффективное подавление помехи нормального вида достигается путем выбора длительности первого такта интегрирования равным или кратным целому числу периодов помехи. В соответствии с принципами действия таких ЦВ результат измерения прямо пропорционален среднему значению измеряемого напряжения на первом такте интегрирования, а среднее значение синусоидальной помехи за период равно нулю. Но частота сетевого напряжения не строго постоянна и может изменяться в пределах 50 ± 0, 5 Гц. В ЦВ с постоянной длительностью интервала tинт (рис. 8.4) последнее обстоятельство накладывает ограничение на степень подавления помехи. В связи с этим в таких ЦВ также применяют входные фильтры для большего подавления помех.
Входное сопротивление ЦИП характеризует мощность, потребляемую им от объекта измерения.
Быстродействие ЦИП оценивается числом измерений в секунду.
Точность измерений ЦИП отражает близость их результатов к истинному значению измеряемой величины. Класс точности ЦИП определяется пределом допускаемой относительной погрешности
γ отн = [c + d(│ Xк/X│ - 1)],
где с и d — постоянные числа, характеризующие класс точности ЦИП соответственно в конце и начале диапазона; Хк — конечное значение диапазона. Класс точности обозначается в виде дроби c/d, например класс 0, 02/0, 01.
Помехоустойчивость ЦИП определяется степенью подавления помех на его входе и характеризуется коэффициентом подавления помех
K=20lg(Enoм /.U0),
где ЕП0М — амплитудное значение помехи на входе прибора; Uo — эквивалентное входное постоянное напряжение, вызывающее такое же изменение показаний прибора, что и Епом.
Технические характеристики типичного универсального ЦИП:
Диапазон входных величин........... 20 мВ... 1кВ, 0, 2 мА...2 А,
200МОм...10 МОм
Абсолютная погрешность от верхнего предела измерений, % 0, 001...0, 5
Стабильность от верхнего предела измерений, %:
за сутки......................................................... 0, 002
за 6 мес........................................................ 0, 008
Разрешение.......................................................... 10 - 6
Время выполнения операции........ 2 мс...1с
Входные характеристики:
сопротивление, МОм................. 10
емкость, пФ.............................. 40
частота (для переменного напряжения) 100 кГц...1 МГц
Достоинства: высокая чувствительность (по напряжению постоянного тока 1 нВ, по напряжению переменного тока 1 мкВ, по постоянному току 1 нА, по переменному току 5 мкА, по сопротивлению постоянному току 10 мкОм, по частоте от долей Гц). Высокая точность измерения (ЦИП подразделяют на восемь классов точности: 0, 005; 0, 01; 0, 02; 0, 05; 0, 1; 0, 2; 0, 5; 1, 0). Удобство и объективность отсчета и регистрации; возможность дистанционной передачи результата измерения в виде кодовых сигналов без потери точности; возможность сочетания ЦИП с вычислительными машинами и другими автоматическими устройствами, высокая помехозащищенность.
Недостатки: сложность устройств и, следовательно, высокая их стоимость, невысокая надежность.
Перспективы развития ЦИП: достигнутый уровень метрологических характеристик в целом удовлетворяет требованиям практики и приближается к характеристикам соответствующих эталонов, поэтому основные усилия разработчиков направлены на повышение надежности ЦИП и создание ЦИП с расширенными функциональными возможностями, обеспечивающих потребителю максимум эксплуатационных удобств, что естественно связано с широким применением микроэлектроники и микропроцессорной техники.
Микропроцессор — это устройство, предназначенное для выполнения вычислительных и логических функций в соответствии с поступающими командами и выполненное на БИС. В сочетании с другими устройствами: блоками памяти, устройствами ввода-вывода и управления (УУ) микропроцессор образует микроЭВМ, и ее технические возможности удовлетворяют большинство требований, предъявленных со стороны ЦИП. МикроЭВМ осуществляет функции управления работой ЦИП и обработку промежуточных и окончательных результатов. Высокая точность обеспечивается за счет использования микроЭВМ для автоматической коррекции погрешности (внесение поправок в результат каждого измерения — по аддитивной и мультипликативной составляющей). Повышение надежности ЦИП осуществляется в основном программным путем.
Применение микропроцессорных систем в измерительной технике повышает точность приборов, расширяет их возможности, упрощает управление процессом измерений, автоматизирует калибровку и поверку приборов, позволяет выполнять вычислительные операции и создавать полностью автоматизированные приборы с улучшенными метрологическими характеристиками.
|
|