Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Потенциометрическая схема
|
|
В общем случае U=f(r) является нелинейной. Причем чем меньше Rн по сравнению с R, тем нелинейность больше. В общем случае выражение принимает вид
U=(Uн /R)r, (1.27)
Таким образом, статическая характеристика U=f(r) при R н > R является линейной с коэффициентом передачи k=Uп /R.
В связи е этим при использовании потенциометрической схемы применяют нагрузку с высоким входным омическим сопротивлением (например, выходное напряжение U подают на вход электронного усилителя).
При R н > R напряжение U=(Uн / l mах ) l, (1.29)
На рис. 1.14, г представлены статические характеристики U=f(l). Прямая 1 соответствует статической характеристике, определяемой выражением (1.29). Кривые 2 и 3 — статические характеристики, причем кривая 3 соответствует меньшему сопротивлению нагрузки.
Так как линейная статическая.характеристика элемента, как правило, является более предпочтительной в автоматических системах, то преобразователи активного сопротивления обычно включаются по потенциометрической схеме при большом входном сопротивлении нагрузки. Преобразователи активного сопротивления для получения статической характеристики со средним нулевым положением включают по схеме (см. рис. 1.13, г). Статическая характеристика в этом случае при RH> R имеет вид, представленный на рис.1.14, д.
Для получения линейной статической характеристики преобразователи активного сопротивления часто включаются в мостовую схему с механической отрицательной обратной связью.
 5. Использование мостовой схемы с датчиками активного сопротивления
5. Использование мостовой схемы с датчиками активного сопротивления
Рис. 1.16. Использование в АСР мостовой схемы с преобразователями активного сопротивления и механической отрицательной обратной связью
На рис. 1.16 дан пример использования мостовой схемы с датчиками активного сопротивления и механической отрицательной обратной связью
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
в автоматических системах регулирования. Напряжение питания Un подается в диагональ bd моста, а выходное напряжение снимается с диагонали ас. При поступлении на объект регулирования ОР возмущающего воздействия регулируемая величина начинает отклоняться от заданного значения, что фиксируется измерительным прибором ИП. Реостатный преобразователь (датчик) R встроен в этот прибор. Вместе с перемещением стрелки прибора ИП подвижная часть прибора перемещает и движок реостата R. Баланс моста нарушается, исполнительный механизм ИМ начинает перемещать регулирующий орган РО, добавляя или уменьшая подачу энергии или вещества в объект регулирования, компенсируя тем самым возмущающее воздействие на объект. Одновременно исполнительный механизм ИМ перемещаетдвижок реостата обратной связи R2, который встраивается в ИМ, восстанавливая тем самым равновесие измерительного моста. При равновесии моста исполнительный механизм ИМ останавливается; при этом отклонение регулируемой величины от заданного значения начинает уменьшаться, исполнительный механизм включается снова, но в противоположную сторону. После ряда таких включений в автоматической системе регулирования заданное значение регулируемой величины восстанавливается. Включение автоматической системы в работу осуществляется следующим образом. Исполнительный механизм ИМ отключает от регулирующего органа РО, перемещая вручную регулирующий орган РО, устанавливают заданное значение регулируемой величины в объекте по показаниям измерительного прибора ИП. При этом равновесие моста при изменении показаний прибора и перемещении движка реостата R восстанавливается автоматически путем перемещения исполнительного механизма движка реостата R2. После установления заданного значения регулируемой величины исполнительный механизм ИМ подключается к регулирующему органу РО. Далее заданное значение регулируемой величины поддерживается автоматически.
Изложенный порядок включения автоматической системы регулирования работу на практике называют «бестолчковым» — в момент перевода системы автоматический режим никаких регулирующих воздействий (толчков) на объект не оказывается, так как в момент включения значение регулируемой величины равно заданному.
Если в системе не предусмотрено ручное управление регулирующим органом, то ее бестолчковое включение можно осуществить другим способом. Отключается связь исполнительного механизма ИМ с реостатом обратной связи R2. Исполнительный механизм переводится на дистанционное управление. В режиме дистанционного управления устанавливается заданное значение регулируем величины. Затем при перемещениивручную движка реостата R2 балансирую мостовая схема. После этого включается связь исполнительного механизма движком реостата R2. Перевод системы на работу при другом заданном значеннн регулируемой величины осуществляется аналогичным образом.
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
Основные достоинства датчиков активного сопротивления— их простота, применимость для схем как постоянного, так переменного токов. Их недостатки — из-за загрязнения и окисления возможно нарушение электрического контакта между движком токопроводящим слоем резистора, требуются значительные усилие для перемещения движка, сложность кинематической механической связи узла перемещения движка, в результате чего в ней неизбежны люфты, трение ит. п. Все это снижает точность преобразования сигнала этими элементами.
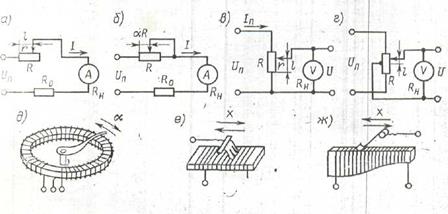 1.Собрать приборы по схеме а).
1.Собрать приборы по схеме а).
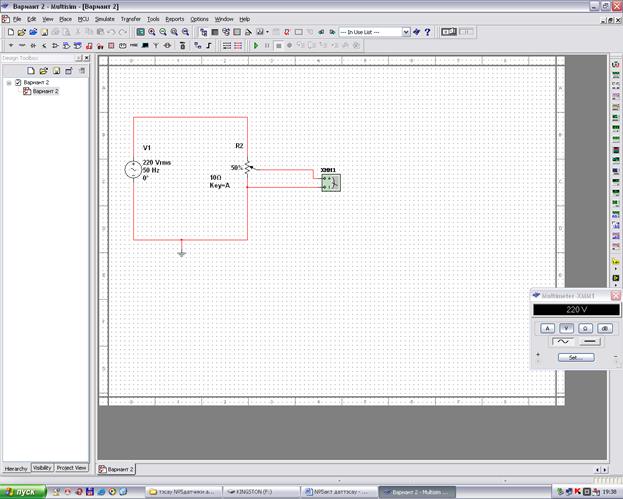
| 1) Использовать программу NATIONAL INSRUMENTS. 2) Выбрать MULTISIM 10.1 3) Выбираем источник питания по своему варианту и устанавливаем параметры источника двойным щелчком мыши. 4) Выбираем переменный резистор (POTENTIOMETR) и устанавливаем параметры резистора двойным щелчком мыши по своему варианту. 5) Выбираем мультиметр для измерения тока и устанавливаем параметры для измерения. 6) Величину перемещения определяем по формуле l= 100 Х/ 100%) 7) R= U/I (Какой закон?) |
2. Измерить значения тока I и напряжения U при различных положениях подвижного контакта датчика активного сопротивления l. Опытные данные и расчетное сопротивление записать в таблицу.
| Измеренные значения | Вычисленные значения | |||
| U | I | Х | l | R |
3.Расчеты
4. По данным таблицы построить статические характеристики: r=f(l) и I=f(l) 
 5 .Определить чувствительность датчика S=tg
5 .Определить чувствительность датчика S=tg  =
=  =
=
6. Определить Imax = I min=
Выводы
8.Собрать приборы по схеме в).
1) Использовать программу NATIONAL INSRUMENTS.
2) Выбрать MULTISIM 10.1
3) Выбираем источник питания по своему варианту и устанавливаем параметры источника двойным щелчком мыши.
4) Выбираем переменный резистор (POTENTIOMETR) и устанавливаем параметры резистора двойным щелчком мыши по своему варианту.
5) Выбираем мультиметр для измерения тока и устанавливаем параметры для измерения.
6) Устанавливаем заземление - GROUND
7) Соединяем элементы по схеме проводами.
8) Величину перемещения определяем по формуле l= 100 (1- Х/ 100%)
9) Заполнить таблицу по результатам замеров и вычислений
| Измеренные значения | Вычисленные значения | |
| U | Х | l |
U 
l 
9. Определить U max = U min=
Выводы
|
|