Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Структурные схемы средств измерений прямого преобразования
|
|
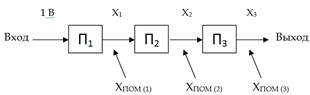
 Передача информации в одну сторону
Передача информации в одну сторону

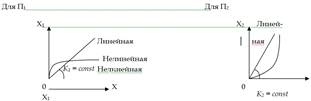
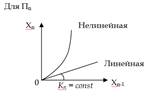
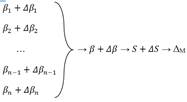
Рассмотрим случай, когда функция преобразования является линейной (для нелинейной ФП – всё то же самое, только дольше и больше). Итак, необходимо найти, как обычно, зависимость входной величины от входной 

Вот это назовём коэффициентом преобразования для всего устройства и обозначим К

В этой схеме, как и в любой другой, возникают два вида погрешностей:
1)Мультипликативная 2)Аддитивная
Мультипликативная погрешность возникает из-за того, что коэффициенты преобразования отдельных блоков схемы могут меняться.

Прологарифмируем выражение **…
 ***
***
… и возьмём производную от последнего 
К чему это приводит? Отвечаем:
Идеально  , а получается в действительности
, а получается в действительности  .
.
Вывод: из-за наличия мультипликативной погрешности выходной сигнал изменяется

Таким образом, «благодаря» мультипликативной погрешности выходной сигнал по отношению к входному будет изменён в  раз.
раз.
Аддитивная погрешность возникает из-за внешних помех и внутренних дрейфов.


Помеха непредсказуема, она может появиться в любой точке схемы. Но, вот если она попадает на вход – это самое «страшное», ибо она, помеха, пройдёт через всю цепь как полезный сигнал и искажения будут чудовищными (ибо на входе уже искажённый сигнал). Не будем рассматривать этот случай, берём в скобках…
Приведём все помехи ко входу устройства (как показано серыми стрелками):
 ****
****
Пример:
Пускай n = 3 блока. Пусть k1 = k2 = k3 = 10
Подали на вход X = 1000 мВ = 1 В, а, в то же время, XПОМ 1 = XПОМ 2 = XПОМ 3 = 1 В.
Нарисуем…
Приводим все погрешности ко входу устройства: 
А для чего вообще мы всё это делаем (приводим ко входу помехи)?
Да причина проста: мы желаем сопоставить величину суммарной помехи системы и значение входной величины, чтобы понять: система, вообще, имеет хоть какой-то смысл или нет.
Выводы:
1) В принципе, число n должно быть конечным (количество элементов должно быть ограничено);
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
2) Первый каскад необходимо сделать грамотно (как и все остальные, разумеется, но к первому – первостепенное внимание, ибо он самый помехоопасный);
3) Можно улучшить характеристики: постараться подобрать параметры элементов таким образом, чтобы уменьшить погрешность.
4) 30)Структурные схемы средств измерений компенсационного преобразователя: 1)с астатической характеристикой
5)
6) Передача информации в прямом направлении

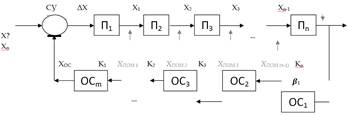
Передача информации в обратном направлении
Совокупность блоков ОСi представляет собой цепь отрицательной обратной связи, в которой информация проходит в противоположном основной цепи направлении.
Обозначения:
СУ – сравнивающее устройство
𝜷 i – коэффициент преобразования ЦОС (цепи обратной связи)
Ki – коэффициент преобразования ЦПП (цепи прямого преобразования или ЦПС – цепи прямой связи)
Цепь замкнута с выхода на вход (принцип ЦОС) и состоит из цепи прямого преобразования с коэффициентом преобразования: 
и цепи обратной связи с коэффициентом преобразования: 
Пускай  – сигналорассогласование или разностный сигнал
– сигналорассогласование или разностный сигнал  .
.
Такая система может работать в двух режимах. В зависимости от различают:
 Астатический режим при = 0. Происходит полная компенсация
Астатический режим при = 0. Происходит полная компенсация 
Статический режим  . Происходит неполная компенсация
. Происходит неполная компенсация 
Рассмотрим астатический режим:  .
.
Астатический режим может быть реализован только при наличии в цепи прямого преобразования интегрирующего (запоминающего) звена (блока). Это звено может стоять в любом месте ЦПП (цепи прямого преобразования). Однако, современные интеграторы обладают сравнительно невысокой чувствительностью (требуют большого сигнала) и ставятся в конце ЦПП.
Пускай интегрирующее звено ПИ


 Из-за него и не будет нуля на выходе (интегрирующее звено будет запоминать дошедшее до него значение). Найдём функция преобразования всего устройства
Из-за него и не будет нуля на выходе (интегрирующее звено будет запоминать дошедшее до него значение). Найдём функция преобразования всего устройства  :
:


Решаем совместно и получаем зависимость:

Последнее выражение справедливо как для всей цепи, так и для каждого отдельно взятого блока.
Коэффициент передачи ЦПП вообще не попал в формулу.
Чувствительность всего устройства в целом:
В этой схеме возникает два вида погрешностей:
Мультипликативная
Из выражения для чувствительности  .
.

Элементы ЦОС можно сделать более стабильными, чем элементы ЦПП (составить только из сопротивлений, часто – без усилителей); тем самым, введение ООС всегда уменьшает мультипликативную погрешность.
Аддитивная

Помехи могут «сесть» как на ЦОС, так и на ЦПП, однако, вероятность того, что помехи попадут на ЦОС крайне мала, ибо такую цепь обычно выполняют низкоомной (сигнал проходит достаточно свободно).
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
Рассмотрим более распространённый случай: когда помехи сели на ЦПП.

Приведём все помехи и порогочувствительность ко входу:

Значит, введение ООС не уменьшает аддитивную погрешность, а только увеличивает её.
Пример: Автоматический мост постоянного тока
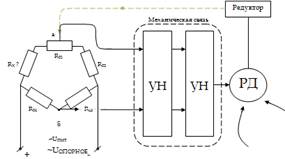
Условные обозначения:
УН – усилитель напряжения; УМ – усилитель мощности (могут быть совмещены в одном приборе, как показано штриховкой); РД – реверсивный двигатель; R0i – образцовое сопротивление. Причём R01 – переменное сопротивление
Схема предназначена для измерения сопротивления RX c высокой точностью (см. «МОСТ» в нулевом методе).
Мосты с автоматизированным процессом уравновешивания называются автоматическими мостами; они находят широкое применение для измерения и регистрации величин. Автоматические мосты с дополнительным регулирующим устройством применяют для автоматического управления производственными процессами. В настоящее время широко распространены автоматические мосты для измерения, регистрации и регулирования температуры различных объектов. В качестве измерительного механизма в подобных мостах применяются терморезисторы.
Схема автоматического моста для измерения сопротивления RX приведена на рисунке выше. Мост питается от источника переменного напряжения питания UПИТ. Если мост уравновешен, то напряжение между точками а и б равно нулю и ротор двигателя РД неподвижен. При изменении измеряемого сопротивления RX на диагонали моста (между точками а и б) появится напряжение, значение которого зависит от RX. Это напряжение усиливается усилителями (простите за тавтологию) и подаётся на реверсивный двигатель РД, который, через редуктор (причина, почему реверсивный двигатель управляет движением резистора именно через редуктор очень проста: никто ведь не управляет марионеточными куклами, привязывая ниточки к маховику автомобильного двигателя, так и здесь: если всю энергию РД будет тратить на передвижение резистора, то последний может просто вылететь из схемы, настолько сильный он получит импульс), передвигает подвижный контакт переменного резистора R01 в сторону достижения равновесия моста и одновременно поворачивает указатель (ведь это же измерительный прибор), а при записи измеряемой величины – перемещает перо, записывающее на диаграмме её значение. Ротор двигателя вращается до достижения равновесия моста. Если автоматический мост предназначен для управления, то тем же двигателем приводятся в действие регулирующие устройства.
Автоматизация процесса уравновешивания в мостах переменного тока значительно сложнее. Автоматические мосты переменного тока для измерения и регистрации комплексного сопротивления должный иметь два регулирующих элемента (двигателя), которые обеспечивают два условия равновесия моста – по модулю и по фазе. По точности автоматические мосты переменного тока уступают мостам постоянного, всё из-за комплексности измерений и количестве элементов в собираемой схеме.
Точность этой схемы определяется порогочувствительностью реверсивного двигателя: чем она меньше, тем чётче будет работать система.
|
|