Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Пример энергокинематического расчета
|
|
мотор-редуктора МЦ2С- а w- i - m1/m2 -000
Исходные данные:
- кинематическая схема – редуктор цилиндрический двухступенчатый соосный РЦ-2С-аw-i- m1/m2 -000 (рисунок 1);
- выходная мощность Рвых = 7, 6 кВт;
- число оборотов выходного вала nвых = 115 мин-1;
- срок службы Т = 20000 часов;
- вид нагрузки – с незначительными динамическими колебаниями.
Расчет
1. Требуемая мощность Рд (кВт) силового привода определяется по формуле (1):
Рд = Кдин × ТН × wвых / η tot = Кдин × 7, 6 / η tot = 1, 2 × 7, 6 / 0, 95 = 9, 6 кВт.
2. Общий КПД привода определяется по формуле (4), значения их принимаются из таблицы 1.
η tot = η 1с × η 2с × η 3 × η пк = 0, 98 × 0, 98 × 0, 9953 = 0, 95
η 1с = 0, 98 – КПД косозубой передачи (1-ая ступень редуктора);
η 2с = 0, 98 – КПД прямозубой передачи (2-ая ступень редуктора);
η п = 0, 995 – КПД подшипников;
к = 3 – количество пар подшипников качения.
3. Передаточное отношение редуктора определяется по формуле (6), значения imax и imin принимаются из таблицы 2.
itot max = i1 max × i2 max = 4, 5 × 4, 5 = 20, 25;
itot min = i1 min × i2 min = 2, 5 × 2, 5 = 6, 25.
4. Определяется максимальная и минимальная частота вращения электродвигателя (мин-1) по формулам (7)
nд max = nвых × itot max = 115 × 20, 25 = 2329;
nд min = nвых × itot min = 115 × 6, 25 = 719.
5. Принимается марка двигателя 4А132М4УЗ, Рд = 11 кВт, nд = 1460 мин-1
6. Определяется фактическое передаточное отношение привода по формуле (8)
itot ф = nд / nвых = 1460 /115 = 12, 7.
7. Значение передаточного отношения принимается из стандартного ряда СТ 312-76, i1с = 4, тогда iс2 = 12, 7 / 4 = 3, 175 принимается iс2 = 3, 15. Пересчет привода не производится вследствие незначительных расхождений itot ф и itot расч.
8. Расчетные зависимости вычисления основных параметров привода (Р, Т, w, n, η, i) приведен в таблице 3.
9. Угловые скорости звеньев, с-1:
- двигателя: wд = π × nд / 30 = 3, 14 × 1460 / 30 = 152, 8
- редуктора:
· вал ведущий w1 = wд = 152, 8
· вал промежуточный w2 = w1 / i1 = 152, 8 / 4 = 38, 2
· вал ведомый wвых = w2 / i2 = 38, 2 / 3, 15 = 12, 127 ≈ 12, 13
10. Частота вращения, мин-1:
- двигателя: 1460 nд = 1460
- редуктора:
· вал ведущий n1 = nд = 1460
· вал промежуточный n2 = n1 / i1 = 1460 / 4 = 365
· вал ведомый n3 = n2 / i2 = 365 / 3, 14 = 115, 8
11. Вращающие моменты, Н × м:
- двигателя: Тд = Рд / wд = 11 × 103 / 152, 8 = 72
- редуктора:
· вал ведущий Т1 =Тд = Рд / wд = 11 × 103 / 152, 8 = 72
· вал промежуточный Т2 = Т1 × i1 = 72 × 4 = 288
· вал ведомый Тн = Тд × i2 = 288 × 3, 15 = 907, 2
12. Мощности, кВт:
- двигателя: Рд = 11 кВт
Силовые и кинематические характеристики привода сводятся в таблицу 4 и являются исходными данными для расчета передач других элементов привода.
Таблица 4 – Параметры привода
| Наименование узла (сборочной единицы) привода, валы передач редуктора | Параметры передач | |||||
| Р, кВт | Т, Н∙ м |  , с-1 , с-1
| n, мин-1 | i | 
| |
Ниже приведен пример энергокинематического расчета привода, состоящего из электродвигателя и цилиндрического двухступенчатого соосного редуктора РЦ-2С- - а w- i - m1/m2- -000
|
|
|
|
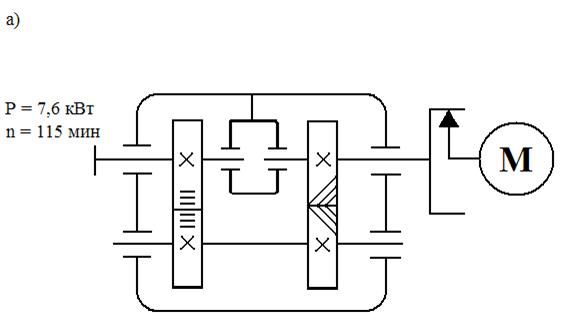
Рисунок 1 – Кинематическая схема мотор-редуктора
| Узлы (сборочные единицы) привода, валы передач редуктора | Параметры привода | ||||||
| Р, кВт | Т, Н× м | w, с-1 | n, мин-1 | η | i | ||
| Двигатель 4А132М4УЗ | 152, 8 | η д | - | ||||
| Редуктор РЦ-2С-а- i-000 | Вал ведущий Вал промежуточный Вал ведомый | 10, 945 10, 62 10, 35 | 71, 63 286, 52 902, 54 | 152, 8 38, 2 12, 13 | 115, 8 | η 1 = 0, 995 η 2 = 0, 97 η вых = 0, 95 | 3, 15 |
Таблица 5 – Параметры привода
- редуктора:
· вал ведущий Р1 = Рд × η п = 11 × 0, 995 = 10, 945
· вал промежуточный Р2 = Р1 × η 1 × η п2 = 10, 945 × 0, 98 × 0, 9952 = 10, 62
· вал ведомый Рвых = Р2 × η 2 × η п = 10, 35
13. КПД привода:
- двигателя: η д
- редуктора: η д
· вал ведущий η 1 = η п = 0, 995
· вал промежуточный η 2 = η 1с × η п2 = 0, 98 × 0, 995 = 0, 97
· вал ведомый η вых = η 1с × η 2с × η п3 = 0, 98 × 0, 98 × 0, 9953 = 0, 95
Результаты расчетов сводятся в таблицу 5 и на кинематическую схему (рисунок 1), которые используются для дальнейших расчетов.
Тема 4, 5, 6 «Конструирование редукторов»
|
|