Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
⚡️ Для новых пользователей первый месяц бесплатно. А далее 290 руб/мес, это в 3 раза дешевле аналогов. За эту цену доступен весь функционал: напоминание о визитах, чаевые, предоплаты, общение с клиентами, переносы записей и так далее.
✅ Уйма гибких настроек, которые помогут вам зарабатывать больше и забыть про чувство «что-то мне нужно было сделать».
Сомневаетесь? нажмите на текст, запустите чат-бота и убедитесь во всем сами!
Реверсивный тиристорный электропривод с раздельным управлением группами вентилей. Логическая схема построения.
|
|
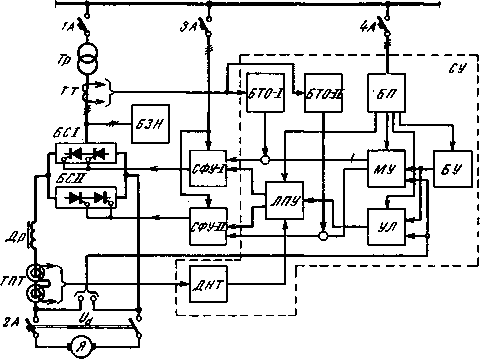
Применение электроприводов с раздельным управлением возможно для механизмов, допускающих в процессе работы исчезновение тока двигателя на время 5—10 мсек.
Силовые блоки БС1 и БСП выполнены по трехфазной мостовой схеме, соединены встречно-параллельно и получают питание от одной обмотки трансформатора логическое переключающее устройство ЛПУ, дополнительный усилитель УЛ, датчик нулевого тока ТПТ и блок датчика нулевого тока ДНТ. Устройство ЛПУ предназначено для раздельного управления вентильными группами и представляет собой трехпозиционное переключающее устройство, выполненное на транзисторах. Это устройство осуществляет логические операции. Усилитель УЛ используется для формирования сигнала управления ЛПУ, он настраивается так, чтобы получить безлюфтовую статическую нагрузочную характеристику. Усилитель УЛ выполнен реверсивным, в частности, возможно использование для этой цели магнитных усилителей.
Датчик нулевого тока совместно с блоком ДНТ позволяет определить момент, когда ток преобразователя становится близким к нулю. Сигнал с датчика подается на один из зходов ЛПУ и дает разрешение на его переключение.
Система фазового управления выполняет две функции: управление тиристорами и создание отрицательного смещения между управляющим электродом и катодом тиристоров для предотвращения самопроизвольного их открывания. Согласование обеих СФУ выполнено в точке 90°. Каждая система управляется от отдельного нереверсивного магнитного усилителя.
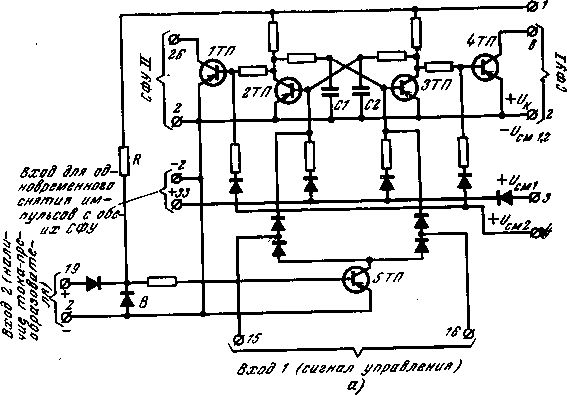
Рассмотрим более подробно логическое переключающее устройство Основой ЛПУ является симметричный триггер на транзисторах 2ТП и ЗТП. Транзисторы 1ТП и 4ТП выполняют роль выходных элементов, которые разрешают и запрещают генерацию импульсов системой фазового управления. Источники регулируемого Найряжения смещения Ucмь 0См2 обеспечивают Надежное запирание транзисторов. При отсутствии сигналов на входах ЛПУ находится в одном из двух устойчивых состояний. В первом устойчивом состоянии отперты транзисторы ЗТП и /777 и заперты транзисторы 2ТП и 4ТП. Во втором устойчивом состоянии, наоборот, отперты транзисторы 2ТП и 4ТП и заперты транзисторы ЗТП и ПП.
В первом устойчивом состоянии база запертого транзистора 2ТП находится под положительным потенциалом относительного эмиттера, а база отпертого транзистора ЗТП находится под отрицательным потенциалом по отношению к его эмиттеру, причем этот отрицательный потенциал по абсолютной величине в несколько раз меньше положительного потенциала базы запертого транзистора 2ТП. В соответствии с этим распределением потенциалов заряжены конденсаторы Сi и С2.
|
35. Системы «Импульсный преобразователь — двигатель постоянного тока». Импульсное управление двигателем постоянного тока.
Суть его заключается в том, что частоту вращения двигателя регулируют не величиной постоянно подводимого напряжения, а длительностью питания двигателя номинальным напряжением. Одна из возможных схем импульсного управления приведена на рис. 2.7, а. Там же (рис. 2.7, б) показаны графики скорости при различных t.
В период, когда электронный ключ открыт, питающее напряжение полностью подается на двигатель, ток якоря увеличивается, двигатель развивает положительный момент и частота вращения возрастает; когда электронный ключ закрыт, ток под действием запаса электромагнитной энергии продолжает протекать в том же направлении но через обратный диод. При этом он уменьшается, момент двигателя уменьшается, угловая скорость вращения падает.
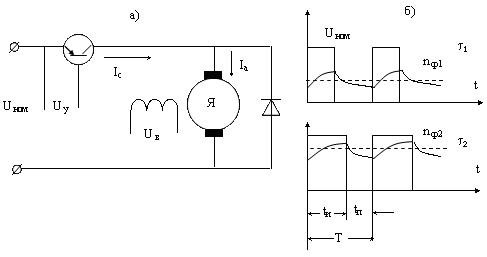
Рис. 2.7. Схема импульсного управления (а), графики скорости вращения (б) при разных τ. (τ 2 > τ 1)
36. Система «Тиристорный преобразователь - двигатель переменного тока». Тиристорные регуляторы напряжения.

Скорость асинхронного двигателя можно регулировать изменением напряжения, подводимого к статору, при этом частота напряжения на двигателе не изменяется и равна стандартной частоте сети 50 Гц.
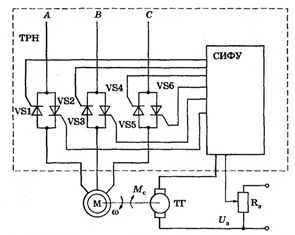
Для регулирования напряжения на статоре АД в настоящее время наибольшее распространение получили тиристорные регуляторы напряжения (ТРН), которые обладают большим быстродействием, высоким КПД, небольшой стоимостью, простотой обслуживания. Трехфазная схема ТРН для регулирования напряжения на статоре АД, построенная на основе однофазных схем ТРН представлена на рис. 6.1, а. Она состоит из шести тиристоров VS1...VS6. В каждую фазу трехфазного ТРН включаются два тиристора по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полупериода напряжения сети U1. Тиристоры получают импульсы управления Ua от системы импульсно-фазового управления (СИФУ), которая обеспечивает их сдвиг на угол управления а в функции внешнего сигнала Uу Изменяя угол управления а от 0 до 180°, можно регулировать напряжение на статоре от полного напряжения сети U1 до нуля.
Регулирование напряжения на статоре не приводит к изменению скорости холостого хода w0 и не влияет на критическое скольжение SК, но существенно изменяет значение критического (максимального) момента Мк. Это связано с тем, что критический момент асинхронного электродвигателя пропорционален квадрату напряжения: Мк ~ U^2.
37. Принципы построения систем подчинённого управления. Функциональная схема. Структурная схема.
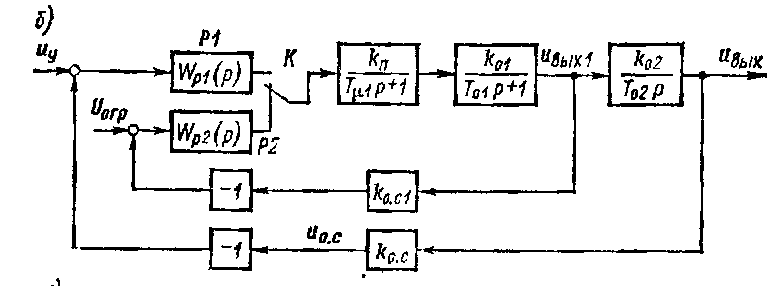


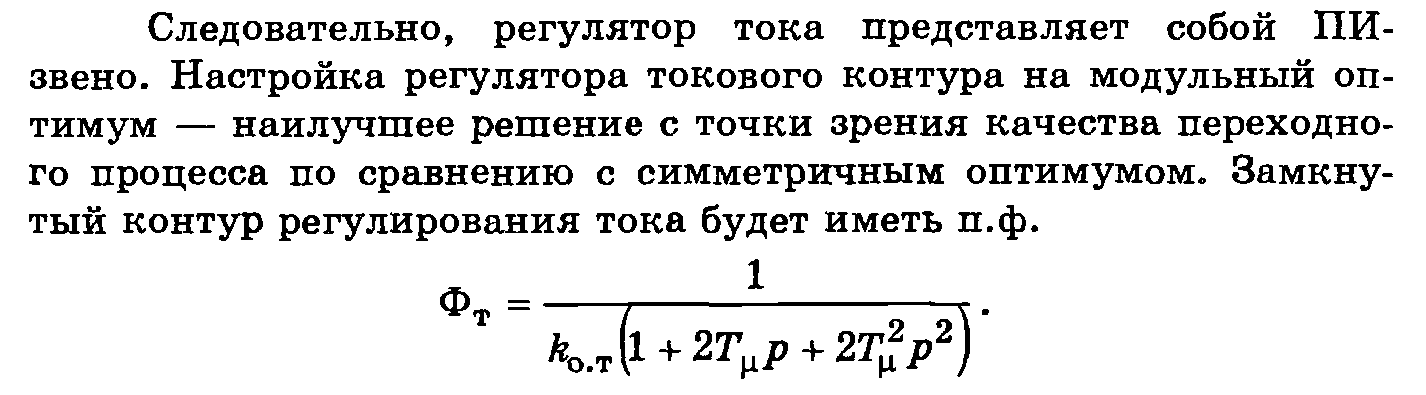
38. Варианты оптимизации контура регулирования тока в системах подчинённого управления.
Последовательная оптимизация контуров управления
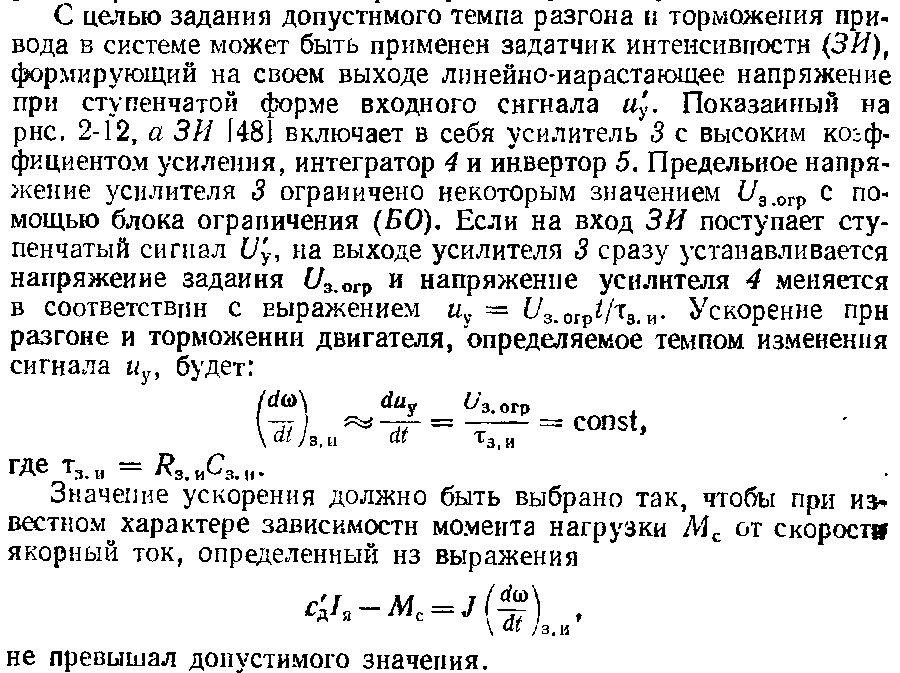
39. Ограничение координат в системах подчинённого управления. Задатчик интенсивности.
40. Оптимизация контура регулирования скорости в системах подчинённого управления.

|
|