Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

Параметр виявлення
|
|
Знаходиться наближено з графіку кривих виявлень з урахуванням FXT.
Для даного варіанту FXT=10-6, q0 = 4.7, q = 4.1;
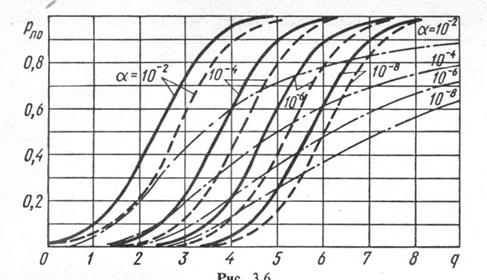
Рис. 2.1 Графік залежності імовірності правильного виявлення від відношення сигнал/шум для заданих значень хибної тривоги
1.9 Максимальна дальність РЛС у вільному просторі
Для РЛС з імпульсними сигналами, зі сполученими передавальною і приймаючою антенами, з когерентним накопичуванням сигналів, дальність виявлення буде визначатися за формулою:

де Pi – імпульсна потужність;
Gп–коефіцієнт підсилення антени;
λ - довжина хвилі;
σ ц — ефективна площа розсіювання цілі;
РПРmin = kT0 ШDfш  - чутливість приймача;
- чутливість приймача;
q0 - параметр виявлення (коефіцієнт розрізнення).
 (1.10)
(1.10)
1.10 Мінімальна дальність РЛС у вільному просторі
Мінімальна дальність РЛС у вільному просторі визначається:
Дmin= 
 ; (1.10)
; (1.10)
1.11 Роздільна здатність РЛС
Роздільна здатність. РЛС характеризує здатність РЛС роздільно спостерігати цілі при мінімальній різниці їх координат по дальності, азимутові, кутових місцях, швидкості. Роздільна здатність при виявленні цілей на екранах індикаторів визначається в такий спосіб.
1) роздільна здатність РЛС за швидкістю:
 , (1.11.1)
, (1.11.1)
де -  смуга пропускання фільтру супроводу за швидкістю (Гц).
смуга пропускання фільтру супроводу за швидкістю (Гц).
2) Роздільна здатність РЛС за кутовими координатами визначається шириною променя ДСА і характеристиками індикаторних пристроїв:
db=  ; (1.11.2.1)
; (1.11.2.1)
 (1.11.2.2)
(1.11.2.2)
де dbінд ( - роздільна здатність індикаторних пристроїв (град).
- роздільна здатність індикаторних пристроїв (град).
1.12 Потенційна точність вимірів РЛС координат повітряних цілей
Точність визначення координат є однією з найважливіших характеристик РЛС, що впливає на ефективність стрільби ЗРК.
На точність вимірів впливають пеленгаційні помилки (обумовлені впливом середовища поширення радіохвиль); інструментальні (викликаються неточностями пристроїв обробки сигналів, юстировочні помилки, помилки індикаторів і т. ін.); динамічні (утворюються за рахунок зміни положення цілі за час між моментами відбиття сигналу від цілі і знімання інформації про її координати в РЛС).
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
Систематичні складові названих помилок зазвичай виміряються і враховуються (з визначеними погрішностями). Тому основний вплив на точність вимірів роблять випадкові складові. Потенційна точність характеризується середньоквадратичною помилкою.
а) кутових координат:
 ; (1.12.1)
; (1.12.1)
 ; (1.12.2)
; (1.12.2)
б) швидкості:
 (1.12.3)
(1.12.3)
Для ІК РЛС на базі двох дзеркальної антени параболічного типу у вигляді таблиці:
Таблиця 1.1
| Рі | λ | 
| 
| Sеф | GП | ТП, с | Мі |  ш, МГц ш, МГц
| Рпрmin | q | Дmax, км | Дmin, км | σ Д | σ b (σ e) | dД | db (be) |

| 
| 
| 
| 1, 32 | 
| 
| 35, 7 | 
| 4, 1 | 10, 5 | 69, 6 | 0, 29 | 12, 35 | 1, 91 |
Висновок: під час виконання 1-го розділу курсової роботи, я визначав ТТХ систем ЗРК відповідно до своїх вихідних даних. Порівнюючи їх з основними характеристиками ЗРК можна сказати, що максимальна дальність виявлення РЛС становить 120 км, що цілком задовольняє вимогам до ЗРК. Роздільна здатність РЛС за кутовими координатами, яка становить 1, 05 град., за азимутом і 1, 911 град. за кутом місця і роздільна здатність за швидкістю, яка становить 12, 35 м/с дозволяє оператору станції під час бойової роботи комплексу своєчасно провести класифікацію повітряних цілей. Середньоквадратична помилка для потенційної точності вимірів РЛС повітряних координат є незначною, щоб її зменшити, або збільшити потрібно змінювати параметри антени і коефіцієнт розрізнення.
РОЗДІЛ 2
РОЗРАХУНОК І ПОБУДОВА ЗОНИ ВИЯВЛЕННЯ РЛС
Розміри радіолокаційного поля визначаються зонами виявлення цілей РЛС і залежать від таких факторів, як розміщення РЛС на місцевості, технічних характеристик РЛС, ефективної поверхні розсіювання цілі, висоти польоту цілі, умов поширення радіохвиль, наявність перешкод та інші.
Теоретичні межі зони виявлення обмежуються:
- для цілей, що низько летять – параметрами зони прямої радіолокаційної видимості;
- для висотних цілей - технічними характеристиками апаратури станції і відбивних властивостей цілі.
2.1 Дальність виявлення РЛС
2.1.1 Дальність виявлення РЛС цілей з різними ЕПР
Дальність виявлення РЛС цілей з імовірністю Рвиявл = 0, 5 цілі з ЕПР 
Розраховується в такий спосіб: якщо відомо Дmax1 цілі з  для конкретної РЛС, то цілі з
для конкретної РЛС, то цілі з  для цієї РЛС можна визначити за співвідношенням:
для цієї РЛС можна визначити за співвідношенням:
Д0, 5 =Дmax2 =Дmax1 
2.1.2 Дальність виявлення цілей, що низько летять
Дальність виявлення цілей, що низько летять (ЦНЛ) з урахуванням нормальної рефракції радіохвиль і коефіцієнта використання радіо горизонту Кр (за умови достатності енергетичного потенціалу РЛС):

— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
де hа, Нц - висота антени і польоту цілі відповідно (м);
Кр = 0, 4÷ 0, 5 – для РЛС м діапазону;
Кр = 0, 55÷ 0, 65 - для РЛС дм діапазону;
Кр = 0, 8÷ 0, 9 - для РЛС см діапазону.
2.1.3Реалізована дальність виявлення
Двиявл = Дmax  ,
,
де Дmax - максимальна дальність дії у вільному просторі (км);
 - коефіцієнт ослаблення, що залежить від
- коефіцієнт ослаблення, що залежить від  і метеоумов (дБ/км)(рис. 4.1):
і метеоумов (дБ/км)(рис. 4.1):
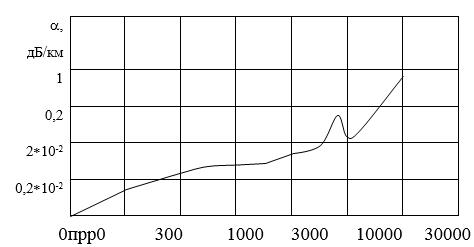
Рис. 2.1. Графік залежності коефіцієнта ослаблення електромагнітних хвиль в атмосфері від , і висоти траси поширення хвиль
2.1.4 Розрахунок дальність виявлення цілі
Змінюючи висоту польоту цілі (Н ці) від значення мінімальної висоти польоту (Н min = 15 м) до значення висоти польоту цілі рівного 500м (H ц = 500м), розраховуються значення поточної висоти за залежністю:
Hці=Hці- 1+  ÷
÷  з урахуванням, що Нцо = Нmin;
з урахуванням, що Нцо = Нmin;
- розраховується Дпр виді: Дпр виді = f(Hці);
- розраховується дальність виявлення (Двиявлi) з урахуванням
загасань ЕМХ:
Двиявл i= Дпр виді  , (2.1.4)
, (2.1.4)
Значення дальності вибирається з умов:
Д 
 =
=  . (2.1.5)
. (2.1.5)
| H ц1 | H ц2 | H ц3 | H ц4 | H ц5 | H ц6 |
| Дпр вид1 | Дпр вид2 | Дпр вид3 | Дпр вид4 | Дпр вид5 | Дпр вид6 |
Результати розрахунків оформлюються у вигляді таблиці:
Таблиця 2.1
| № з/п | H ц1 | H ц2 | H ц3 | H ц4 | H ц5 | H ц6 | |
| 11, 9 | 24, 7 | 25, 7 | 33, 5 | 40, 3 | 45, 1 |
 Д
Д
Висновок: під час виконання 2-го розділу курсової роботи, я розрахував і побудував зони виявлення РЛС для різних висот і дальностей відповідно до своїх вихідних даних. Можна сказати, що дальність виявлення РЛС цілей з різними ЕПР становить 120 км, щоб збільшити дальність виявлення потрібно збільшити ефективну поверхню розсіювання цілі. Дальність виявлення цілей, що низько летять залежить від висоти польоту, чим менше буде висота польоту, тим менше дальність виявлення цілі. У моєму випадку для цілі, що летить на висоті 450м, дальність виявлення становить 77 км. Реалізована дальність виявлення становить 114, 5 км, що залежить від коефіцієнта, який залежить від довжини хвилі і метеоумов.
РОЗДІЛ 3
ЗМІСТ ЗАГАЛЬНОГО ВИСНОВКУ ПО ПРОРОБЛЕНІЙ КУРСОВІЙ РОБОТІ
На основі аналізу розрахункових кількісних показників розвідувальних і вогневих можливостей ЗРК, отриманих за вихідними даними можна дати оцінку бойовим можливостям ЗРК. За розрахованими вище параметрами можна сказати, що ймовірність виявлення і враження повітряних цілей є високою. Таку високу точність забезпечує великий коефіцієнт підсилення антени, високо роздільна здатність РЛС, низька середньоквадратична помилка точності вимірів РЛС, велика дальність виявлення РЛС. Розраховані тактико-технічні характеристики ЗРК «БУК» дозволяють вести ефективну боротьбу з цілями, які летять на низьких висотах та знищувати повітряні цілі різного класу на різних висотах, включаючи крилаті ракети, які є найбільш небезпечними. Також, важливим фактором є висока кваліфікація особового складу розрахунків РЛС.
ВИКОРИСТАНА ЛІТЕРАТУРА
1. Основи побудови засобів РЛ розвідки. Безкровний А.М.
2. «Основи побудови ЗРК і устрій бойових засобів ЗРК 9К37М1»
3. uk.wikipedia.org
4. Лекції по курсу ЗРК «БУК»
|
|