Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Для новых пользователей первый месяц бесплатно. Чат-бот для мастеров и специалистов, который упрощает ведение записей: — Сам записывает клиентов и напоминает им о визите;
— Персонализирует скидки, чаевые, кэшбэк и предоплаты;
— Увеличивает доходимость и помогает больше зарабатывать; Начать пользоваться сервисом

Особенности частотного регулирования СД
|
|
Как уже говорилось частотное регулирование является единично возможным способом регулирования скорости СД и при этом имеет некоторые специфические особенности. Дело в том, что в отличии от АД зависимость момента от напряжения СД  , поэтому при регулировании по пропорциональному закону:
, поэтому при регулировании по пропорциональному закону:

Изменение частоты повлияет на применение  в большой степени, чем у АД.Поэтому главной особенностью частотного регулирования СД, является то, что одновременно с изменением частоты изменяется ток возбуждения:
в большой степени, чем у АД.Поэтому главной особенностью частотного регулирования СД, является то, что одновременно с изменением частоты изменяется ток возбуждения:

привода магистральных насосов широко используются нерегулируемые синхронные двигатели (СД). Поэтому для таких технологических установок представляет интерес использование полупроводниковых преобразователей частоты для регулирования уже установленных СД. Это открывает возможности не только изменения частоты вращения, но и формирования требуемых статических и переходных процессов частотно-управляемых синхронных электроприводов. Такой привод обладает рядом свойств, которым не облает асинхронный электропривод с частотным управлением в разомкнутых системах, а именно:
- стабильность угловой скорости независимо от момента нагрузки во всем диапазоне регулирования угловой скорости;
- стабильность угловой скорости независимо от напряжения питания;
- большие значения моментов при регулировании напряжения и тока возбуждения.
Рассмотрим основные закономерности, связанные с регулированием частоты переменного тока и внутреннего угла сдвига, а также возможные законы регулирования электрических параметров СД при сохранении запаса статической устойчивости [50].
Электромагнитный момент синхронного двигателя с явно выраженными полюсами
 , (1.11)
, (1.11)
где U – напряжение питания на выводах СД; Е – ЭДС в обмотке статора, наведенная магнитным полем возбуждения; Хd и Хq- индуктивные сопротивления по продольной и поперечной осям; θ – угол нагрузки машины.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
Для целей анализа режимов управления это выражение удобно представить, пренебрегая насыщением, в следующем виде
 , (1.12)
, (1.12)
где Iв – ток возбуждения синхронного двигателя; А и В – постоянные величины.
Для управление синхронным двигателем при постоянной частоте (f = const) изменяются напряжение U = var и ток возбуждения Iв = var. Такой режим управления характерен для нерегулируемого синхронного электропривода. Формула (1.12) электромагнитного момента для этого случая:
 , (1.13)
, (1.13)
где c1=A/f; c2=B/f2.
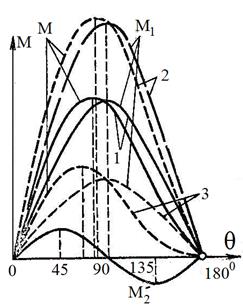
Электромеханические свойства СД в таком режиме управления удобно рассматривать отдельно при изменении только тока возбуждения (Iв = var; U = const) и при изменении только напряжения питания (Iв = const; U = var). Угловые характеристики при этом соответственно представлены на рисунках 1.10 и 1.11.
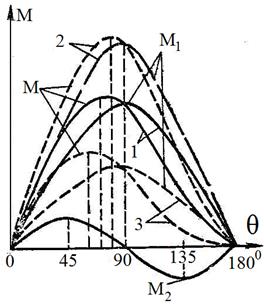 1- нормальное возбуждение; 2 - режим перевозбуждения; 3- режим недовозбуждения;; М1- момент от поля возбуждения; М2 - момент от явнополюсности; М - суммарный момент.
Рисунок 1.10 - Угловые характеристики синхронного двигателя при Iв = var; U = const.
1- нормальное возбуждение; 2 - режим перевозбуждения; 3- режим недовозбуждения;; М1- момент от поля возбуждения; М2 - момент от явнополюсности; М - суммарный момент.
Рисунок 1.10 - Угловые характеристики синхронного двигателя при Iв = var; U = const.
|  1 - U = U ном; 2 - U > U ном; 3 - U < U ном; М1 - момент от поля возбуждения; М2 - момент от явнополюсности; М - суммарный момент
Рисунок 1.11 - Угловые характеристики синхронного двигателя при Iв = const; U = var.
1 - U = U ном; 2 - U > U ном; 3 - U < U ном; М1 - момент от поля возбуждения; М2 - момент от явнополюсности; М - суммарный момент
Рисунок 1.11 - Угловые характеристики синхронного двигателя при Iв = const; U = var.
|
С увеличением тока возбуждения электромагнитный момент СД возрастает (рисунок 1.10), а при снижении напряжения – снижается (рисунок 1.11). Управление током возбуждения в таком режиме используется, обычно. для сохранения запаса статической устойчивости по моменту (для поддержания неизменным значения максимального момента) при снижениях напряжения питания. в электрической сети
При частотном регулировании СД в отличие от частотного регулирования АД появляется опасность потери устойчивости электропривода. Обусловлено это тем, что при изменении частоты питающего напряжения вследствие инерционности вращающихся частей привода угловая частота вращения ротора будет не равна угловой частоте вращения магнитного поля и угол двигателя θ будет изменяться даже при неизменной нагрузке. Если слишком быстро изменять частоту, то угол θ может выйти за допустимые пределы и СД может выпасть из синхронизма. Поэтому на практике в чистом виде частотное регулирование синхронных двигателей (частотное регулирование без самосинхронизации) применяется редко. Удобнее всего использовать его при малых мощностях, когда нагрузочные моменты невелики, а инерция приводного механизма мала [50]. При больших мощностях такие условия имеются только в некоторых типах электроприводов, например в электроприводах центробежных механизмов (вентиляторов, некоторых центробежных насосов). Для синхронных двигателей, применяемых в электроприводах с большим моментом инерции приводного механизма, необходимо очень плавно изменять частоту питающего напряжения, чтобы двигатель не выпал из синхронизма. Достаточно сложным является и пуск двигателя, когда начальная частота должна составлять доли герца, а затем постепенно повышаться до максимального значения. Для таких электроприводов наиболее пригодным является метод частотного регулирования с самосинхронизацией, при котором двигатель в принципе не может выпасть из синхронизма.
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
Частотное регулирование без самосинхронизации. Из выражения (1.12) вытекают следующие возможные режимы частотного управления синхронным двигателем.
1 Режим частотного регулирования синхронного электропривода при постоянном токе возбуждения U/f = const; Iв = const.. По аналогии с частотным регулированием АД такой режим можно назвать пропорциональным законом регулирования при постоянном магнитном потоке. Для пропорционального закона частотного регулирования аналитическая зависимость для характеристики (1.12) имеет вид
 , (1.14)
, (1.14)
где c1=AU/f; c2=B(U/f)2.
Для сохранения запаса статической устойчивости СД по углу нагрузки угол θ в процессе регулирования частоты не должен изменяться. Однако при изменении нагрузочного момента при частотах питающего напряжения, отличных от номинальной частоты, угол нагрузки будет изменяться. Поэтому выдерживать условия U/f = const и Iв = const можно только при неизменных значениях нагрузочного момента Мн = М. При изменении нагрузки частотно-регулируемого СД кроме изменения напряжения необходимо изменять поток возбуждения, т. е. ток возбуждения.
1 Режим частотного регулирования синхронного электропривода при
U/f = const; Iв = var (пропорциональный закон регулирования при переменном токе возбуждения). Изменение тока возбуждения СД в данном случае, по сравнению с АД, предоставляет дополнительные возможности как для управления электромагнитным моментом, так и для управления режимом по генерации реактивной мощности. Для привода буровых лебедок и насосов и в транспорте нефти для привода магистральных насосов широко используются СД большой мощности. Для таких СД обычно используется режим работы двигателя с cosφ =1. При этом ток статора минимальный и в обмотке статора имеются минимальные потери мощности и энергии. При этом управление током возбуждения может использоваться для стабилизации коэффициента мощности.
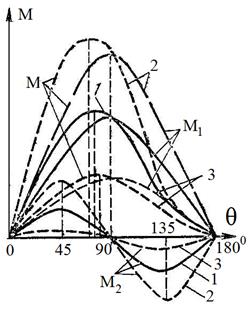
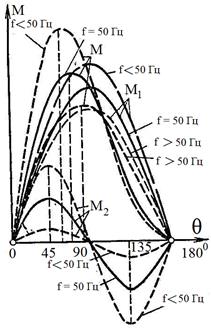
Для пропорционально закона частотного регулирования характеристики для разных токов возбуждения приведены на рисунке 1.12 [50],
3 Режим частотного регулирования синхронного электропривода при U = const; Iв = const; f = var.
Для такого режима формула электромагнитного момента: (1.12) принимает вид
 ; (1.15)
; (1.15)
где c1=AUIв; c2=BU2.
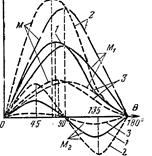
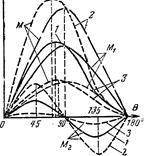
Из (1.18) видно, что при низкой угловой скорости (частоте напряжения статора) синхронный двигатель обладает значительным максимальным моментом. Угловые характеристики СД для случая изменения только частоты приведены на рисунке 1.13. Увеличение максимального момента при снижении угловой скорости (частоты питающего напряжения) СД, но при неизменном напряжении связано с большим увеличением тока статора, которое определяется уменьшением синхронной ЭДС и реактивных сопротивлений двигателя.
 1 - нормальное возбуждение; 2 - повышенное возбуждение; 3 - пониженное возбуждение; М1 - момент от поля возбуждения; М2 - момент от явнополюсности; М – суммарный момент.
Рисунок 1.12 - Угловые характеристики частотно-регулируемого синхронного электропривода при U/f = const; Iв = var.
1 - нормальное возбуждение; 2 - повышенное возбуждение; 3 - пониженное возбуждение; М1 - момент от поля возбуждения; М2 - момент от явнополюсности; М – суммарный момент.
Рисунок 1.12 - Угловые характеристики частотно-регулируемого синхронного электропривода при U/f = const; Iв = var.
|  М1 - момент от поля возбуждения; М2 - момент от явнополюсности; М – суммарный момент.
Рисунок 1.13 - Угловые характеристики синхронного двигателя при U= const; Iв = const; f = var.
М1 - момент от поля возбуждения; М2 - момент от явнополюсности; М – суммарный момент.
Рисунок 1.13 - Угловые характеристики синхронного двигателя при U= const; Iв = const; f = var.
|
|
|
Все законы регулирования, рассмотренные применительно к явно-полюсным СД, применимы и для неявнополюсных двигателей. Закон регулирования напряжения и тока возбуждения неявнополюсного синхронного двигателя при изменении угловой скорости (частоты) и момента нагрузки и заданном запасе статической устойчивости определяется первой составляющей (1.15) для электромагнитного момента.
При постоянстве угла нагрузки синхронного двигателя для закона регулирования напряжения и тока возбуждения получаем
1/sinθ ном.=A·Uном. ·Iв.ном./fном. ·Мном. = А·U·Iв/f·M,
откуда
U·Iв./Uном. ·Iв.ном=f·М/fном·Мном. (1.16)
При U/f= Uном/fном = const получим следующую зависимость тока возбуждения синхронного двигателя от момента на валу:
Iв./ Iв.ном= М/Мном. (1.17)
Из (1.17) следует, что при постоянном отношенииU/f возбуждение синхронного двигателя должно изменяться прямо пропорционально изменению момента на валу.
Для Iв=Iв.ном.=const из (1.16) следует, что U/f=Uном/fном=const и регулирование производится при постоянном моменте. В случае постоянной мощности регулирование осуществляется изменением только частоты при неизменных возбуждении и напряжении.
По аналогии с двухзонным регулированием двигателей постоянного тока независимого возбуждения можно осуществить двухзонное регулирование угловой скорости синхронных двигателей: при постоянном моменте используется регулирование в зоне до номинальной угловой скорости, а при постоянной мощности - в зоне регулирования выше номинальной угловой скорости.
При ограниченном диапазоне регулирования угловой скорости и и при малых нагрузках иногда можно принять приближенное равенство Е ≈ U, тогда из (1.17) при условии постоянства угла θ и тока возбуждения (Iв=const) получаем:
 , (1.18)
, (1.18)
т. е., при оговоренных выше условиях, закон частотного регулирования СД имеет тот же вид, что и для асинхронного двигателя при частотном управлении. В этих случаях и частотные законы регулирования для различного вида нагрузок будут одинаковы для обоих типов машин
U/f= const при М = Мном. = const;
U/  = const; при Р = Рном. = const;
= const; при Р = Рном. = const;
U/f2 = const при вентиляторной нагрузке.
Из (1.18), в частности, следует, что при некоторой фиксированной частоте fи при изменении момента нагрузки напряжение нужно регулировать по закону
 (1.19)
(1.19)
угол нагрузки при этом останется неизменным в диапазоне изменения момента от холостого хода до номинального.
При использовании выражений (1.21) и (1.22) следует помнить, ято они применимы только при допустимости равенства Е ≈ U,
Для явнополюсного синхронного двигателя регулирование тока возбуждения, как это следует из (1.15), приводит к изменению только одной составляющей момента, поэтому закон регулирования тока возбуждения существенно усложняется, в частности при U/f=const и θ =const
Iв./ Iв.ном=(M - b)/(Mном. – b)
где b- постоянная величина [50].
Предел статической устойчивости синхронного двигателя с неявновыраженными полюсами наступает, когда угол θ становится равным 900 при максимальном моменте
M1max=AUIв./f. (1.20)
Как видно из (1.20), при уменьшении частоты переменного тока максимальные значения электромагнитных моментов увеличиваются и, наоборот, с увеличением частоты уменьшаются.
Для синхронных двигателей с явновыраженными полюсами при изменении частоты переменного тока неучет реактивного электромагнитного момента (от явнополюсности) приводит к значительным погрешностям в оценке механических свойств.
При низких частотах пренебрежение активным сопротивлением статорной обмотки вносит значительные искажения в расчетное значение электромагнитного момента. Отрицательное влияние активного сопротивления статора на характеристики синхронного двигателя проявляется в меньшей степени и при относительно более низких частотах, чем в случае асинхронного двигателя, и может быть в определенной мере скомпенсировано регулированием возбуждения.
Частотное регулирование синхронных двигателей, как и частотное регулирование асинхронных двигателей с короткозамкнутым ротором, плавное экономичное двухзонное; стабильность скорости высокая (идеально жесткие характеристики); допустимая нагрузка при постоянном возбуждении - номинальный момент (в случае независимой вентиляции); диапазон регулирования вверх от основной угловой скорости ограничивается механической прочностью ротора и подшипников; диапазон регулирования вниз с учетом идеальной жесткости характеристик может быть большим [до 50 - 100): 1 и более] при обеспечении синусоидальности напряжения, достаточного запаса устойчивости и сохранении значения максимального момента.
Синхронный двигатель обладает важным для некоторых применений (например, для буровой лебедки) свойством - при подаче в обмотки статора постоянного тока он создает тормозной момент при неподвижном роторе, обеспечивая тем самым электрическую фиксацию ротора в заданном положении. Это позволяет использовать СД в качестве тормоза.
Частотное регулирование с самосинхронизацией. Вентильный двигатель. Принцип частотного регулирования с самосинхронизацией заключается в том, что управление преобразователем частоты осуществляется от системы датчиков положения ротора, вследствие чего напряжение подается на каждую фазу двигателя при углах нагрузки 0 < 90°. При таком регулировании автоматически обеспечиваются условия устойчивой работы двигателя и его перегрузочная способность определяется только перегрузочной
способностью преобразователя частоты. Синхронные двигатели, регулируемые путем изменения частоты с самосинхронизацией, называют вентильными двигателями; иногда их называют бесколлекторными двигателями постоянного тока.
|
|