Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника

на аудитрную контрольную работу
|
|
Задание № 47
по дисциплине «ТММ»
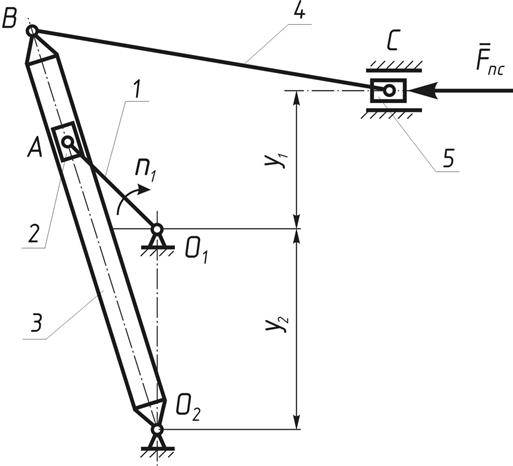
Для заданного положения шестизвенного механизма построить план скоростей. Найти скорости точек A, B, C и угловые скорости звеньев 3 и 4. Направления угловых скоростей звеньев указать на схеме механизма. Учитывая массу звеньев и действующую на ведомое звено силу полезного сопротивления Fпc определить приведённый к ведущему звену 1 момент Mпр .
Исходные данные: n1 = 150 об/мин, y1 = 250 мм, y2 = 370 мм,  = 220 мм,
= 220 мм,
 = 790 мм,
= 790 мм,  = 650 мм, Fпc = 1100 Н, т 1 = 6 кг,
= 650 мм, Fпc = 1100 Н, т 1 = 6 кг,
т 2 = 1, 6 кг, т 3 = 20 кг, т 4 = 20 кг.
Пример выполнения
аудиторной контрольной работы (задание № 47)
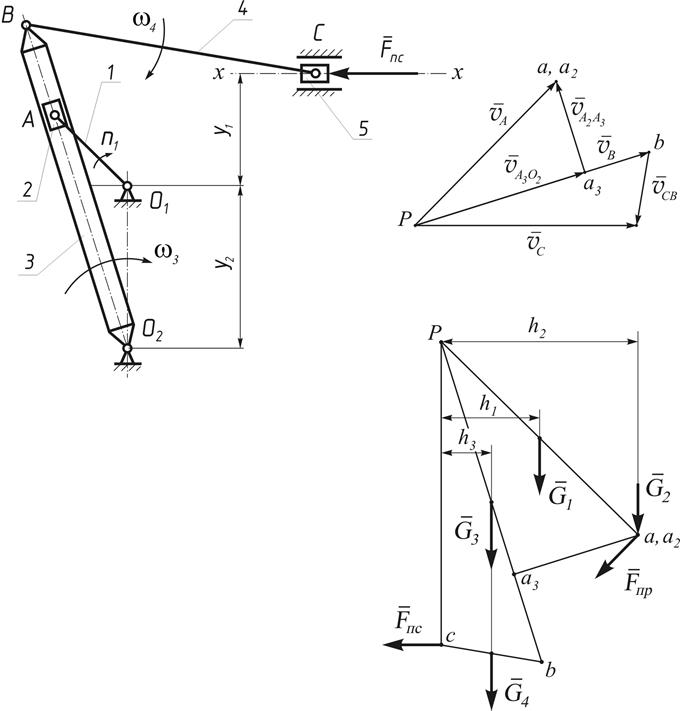
На первом этапе выполнения работы строим план скоростей механизма, определяем величину линейных скоростей точек и угловых скоростей звеньев.
Построения начинаем от произвольно выбранной точки Р, называемой полюсом плана скоростей. Полюс плана скоростей символизирует неподвижную систему координат и соответствует всем неподвижным точкам механизма (в данном случае это неподвижные цилиндрические шарниры О 1 и О 2, направляющая ползуна 5, корпус (основание) механизма). Построение плана скоростей для всего механизма производится путем последовательного построения планов скоростей для каждого его звена от ведущего к ведомому.
Первым из полюса Р откладываем вектор  скорости т. А, принадлежащей звену 1. Направление вектора определяется заданным на схеме механизма направлением вращения кривошипа 1. Вектор изображаем отрезком произвольной длины
скорости т. А, принадлежащей звену 1. Направление вектора определяется заданным на схеме механизма направлением вращения кривошипа 1. Вектор изображаем отрезком произвольной длины  .
.
Точка А кулисы 2 совершает сложное движение:
 где
где  О2А, а
О2А, а  О2А.
О2А.
Из полюса Р проводится линия, соответствующая направлению вектора переносной скорости  , а из т. а линия, соответствующая направлению вектора скорости
, а из т. а линия, соответствующая направлению вектора скорости  кулисного камня относительно кулисы. Точка а 3 пересечения этих линий определяет модули векторов переносной и относительной скорости. Стрелки (направления) векторов указываем таким образом, чтобы вектор абсолютной скорости точки А являлся их геометрической суммой.
кулисного камня относительно кулисы. Точка а 3 пересечения этих линий определяет модули векторов переносной и относительной скорости. Стрелки (направления) векторов указываем таким образом, чтобы вектор абсолютной скорости точки А являлся их геометрической суммой.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
Точка b на плане скоростей определяется при помощи теоремы о подобии картины относительных скоростей перемещающейся фигуре:
 , тогда
, тогда 
При определении величины и направления скорости точки С учитывается, что эта точка одновременно принадлежит совершающему плоскопараллельное движение шатуну 4 и движущемуся поступательно вдоль неподвижной направляющей ползуну 5. В результате скорость точки С должна удовлетворять следующим условиям:


Из полюса Р проводится линия, соответствующая направлению вектора  абсолютной скорости точки С. Из точки b плана проводится линия, соответствующая вектору
абсолютной скорости точки С. Из точки b плана проводится линия, соответствующая вектору  относительной скорости точки С звена 4 относительно полюса звена В. Пересечение этих линий определяет положение точки с на плане скоростей.
относительной скорости точки С звена 4 относительно полюса звена В. Пересечение этих линий определяет положение точки с на плане скоростей.
Направления векторов скоростей  и , приложенных к соответствующим точкам звеньев, позволяют определить направления угловых скоростей
и , приложенных к соответствующим точкам звеньев, позволяют определить направления угловых скоростей  и
и  . Направления угловых скоростей звеньев указываются на схеме механизма.
. Направления угловых скоростей звеньев указываются на схеме механизма.
Угловая скорость ведущего звена: 
Модуль скорости точки А кривошипа:  .
.
Масштаб плана скоростей:  .
.
На плане скоростей в мм измеряются длины векторов и при помощи масштабного коэффициента  определяются их модули:
определяются их модули:
 ,
,
 ,
,
 .
.
Модули угловых скоростей звеньев 3 и 4:
 ,
,
 .
.
Для определения приведенного момента Mпр предварительно находим приведенную к точке А звена 1 силу Fпр. Строится в произвольном масштабе повёрнутый на 90° план скоростей и к соответствующим точкам плана прикладываются действующие на звенья механизма силы тяжести, сила полезного сопротивления и искомая приведенная к ведущему звену сила. Повернутый план скоростей строится так, как и действительный, только все линии, которые ранее проводились перпендикулярно звеньям, теперь проводятся параллельно, а те, которые проводились параллельно – перпендикулярно.
Силы тяжести звеньев:
 ,
,  ,
,
 ,
,  .
.
Из условия равенства мощностей, развиваемых приведенной силой и остальными действующими на звенья механизма силами:


 .
.
Знак «–» говорит о том, что приведенная сила является силой сопротивления движению, т. е. действительно направлена противоположно скорости т. А. В дальнейшем расчете используем модуль приведенной силы.
Приведенный момент: 
|
|