Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Асинхронные двигатели. Шаговые и вентильные двигатели. Применение асинхронных двигателей ограничено из-за сложности изготовления и высокой стоимости преобразователей для регулирования частоты вращения вала ротора
|
|
Применение асинхронных двигателей ограничено из-за сложности изготовления и высокой стоимости преобразователей для регулирования частоты вращения вала ротора. Использование таких двигателей считается оправданным, если грузоподъемность выше 40 кг. В зависимости от вида напряжения питания и обмотки статора эти двигатели бывают двухфазными и трехфазными. Схема включает 2 обмотки, расположенные на статоре:

где ОВ-обмотка возбуждения, ОУ-обмотка управления. Они смещены в пространстве друг относительно друга на 90о. ОВ питается переменным током сети, ОУ-от переменного напряжения Uу, т.к. в цепь ОУ включена емкость С, то напряжение сдвинуто по фазе относительно Uв на 90о. Амплитуда Uу меняется в зависимости от управляемой величины, а амплитуда Uв постоянна. Ротор АД короткозамкнутый, при взаимодействии полей от индукционных токов, наводимых в роторе с электрическим результирующим полем статора в двигателе возникает вращающий момент, приводящий в движение ротор. В динамическом отношении двухфазный асинхронный двигатель относительно частоты вращения считают апериодическим звеном с передаточной функцией: Wдв(S)=w(S)/Uя(S)=кдв/(STм+1).
Шаговые: они обеспечивают получение дискретного привода в ПР. Они обычно соединяются с исполнительным устройством через механическую передачу. Принцип действия основан на дискретном изменении магнитного поля в статоре машины. При переключении обмотки статора магнитодвижущая сила статора поворачивается на некоторый угол(шаг), вызывая поворот ротора на тот же шаг. ШД дают возможность преобразовать управляющие импульсные сигналы в угол поворота вала без датчиков обратной связи. Существует множество вариантов исполнения ШД. Они отличаются по способу управления, по принципу действия и конструктивному исполнению. требованиям устойчивости движения, быстродействия и их надежности наилучшим образом удовлетворяют синхронные Д с активным или реактивным ротором. Как правило, у ШД статор выполняется явнополюсным. Вокруг полюсов укладываются катушки двух-, трех- или четырехфазной обмотки. Ротор выполняется виде постоянного магнита без полюсных наконечников.

Принцип действия ШД с много фазной обмоткой на статоре и ротором в виде постоянного магнита может быть пояснен рисунком РИСУНОК
Если подать напряжение на 1, 2…m фазу, то ротор повернется так, что его ось совпадет с осями обмоток. При этом ротор имеет m устойчивый состояний, определяемый направлением вектора магнитодвижущей силы(МДС) ротора. Шаги при этом равен 2π /m Если подать напряжение на 2 соседние фазы, то ось ротора расположится посередине между осями фаз. Если на 3-то со средней фазой. Следовательно, если включать поочередно четное и нечетное число фаз, то ротор будет иметь 2m устойчивых положений, а шаг равен p/m. В динамике шаговый двигатель рассматривают как импульсный нелинейный элемент. Вентильный двигатель -это электропривод с синхронным двигателем и инвертором. Управление двигателем зависит от угла поворота ротора. Структура управления частотой вращения двигателя может быть представлена следующей схемой
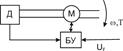
Управляет частотой вращения двигателя блок управления по сигналу от датчика. Синхронный двигатель питается переменным током, а частота вращения или угловая скорость определяются частотой тока в сети. Обмотка статора создает вращающееся магнитное поле и она может быть 2-х или 3-фазной, с однофазной или с пусковой емкостью. Конструкция ротора определяет тип синхронного двигателя: с возбуждением от явнополюсных электромагнитов, от постоянных магнитов, гистерезисный, субсинхронный, реактивный, с катящимся или волновым ротором. Принципиальная схема СД с возбуждением от ПМ. РИСУНОК вращение ротора вызывается взаимодействием поля ротора и вращащегося поля обмотки статора. Если угловые скорости полей и число пар полюсов на роторе и статоре равны, то между разноименными полюсами статора и ротора возникает электромагнитное притяжение, которое вызывает появление электромагнитного момента, называемого синхронным. При запуске угловая скорость ротора не равна синхронной. Синхронный момент близок к нулю. Для увеличения угловой скорости и входа в режим синхронизации при запуске на роботе СД конструируют дополнительную короткозамкнутую обмотку (беличья клетка). Частота вращения двигателя: nдвиг=nполя статора=60f/р, где f-частота тока питания статора, р-число пар полюсов. Частоту вращения двигателя можно изменяя число пар полюсов или частоты вращения поля статора. Обычно используется 2-й способ. Для изменения режима работы и обеспечения реверса в электроприводах с высоким моментом инерции приводного механизма нужно плавно изменять частоту напряжения, питающего СД, чтобы двигатель не выходил из положения синхронизма. Это сложно, особенной когда начальная частота-доли Герц, а затем возрастает до максимального значения. В этом случае используют метод частичного регулирования с самосинхронизацией. Управление преобразователем частоты происходит от системы датчиков положения ротора. Питание вентильных двигателей может быть как от сети постоянного, так и от сети переменного тока. Обычно для питания двигателя от сети постоянного тока используется схема тиристорного преобразователя частоты с инвертором напряжения, если же от сети переменного тока(3-фазного), то применяют схему преобразователя частоты с тиристорным выпрямителем.
19.Датчики положения: потенциометрические датчики, вращающиеся трансформаторы, резольвер, индуктосин, сельсин.
Для следящих приводов робота для измерения положения используют аналоговые и цифровые датчики. Для измерения положения(угла) в ПР обычно используются: аналоговые(потенциометрические датчики, вращающиеся трансформаторы, резольверы, индуктосины). эти датчики относятся к аналоговым датчикам, а кодовые и импульсные – к цифровым датчикам. Из индукционных датчиков широко используются вращающиеся трансформаторы и сельсины.

Потенциометрические датчики: Они преобразуют угловое движение aдвиж в выходное напряжение. На выводы потенциометра подается постоянное или переменное напряжение. В потенциометрических датчиках используются проволочные или пленочные потенциометры. Статическая характеристика Uвых=f(a)-зависимость выходного напряжения от положения-нелинейна. Нелинейность тем выше, чем выше b=Rн/R, где Rн-активное сопротивление нагрузки, R-сопротивление потенциометра. Чувствительность потенциометрического датчика – 3..5 ·10-3 В/мм. Точность проволочных датчиков может составлять 0, 05%. Их недостаток из-за дискретного изменения сопротивления при перемещении щетки движка получается ступенчатая характеристика. Для обеспечения стабильности работы датчики должны иметь сопротивление R больше 1000 Ом. Стабильность характеризуется температурным коэффициентов.

Вращающиеся трансформаторы-это электрические машины переменного тока с неявно выраженными полюсами. В статоре и роторе укладываются 2 взаимно перпендикулярных обмотки.
При подаче в одну из первичных обмоток синусно-косинусного вращающегося переменного напряжения, во вторичных обмотках наводятся ЭДС, изменяющиеся по закону.  , где
, где  -коэффициент трансформации. Статическая характеристика синусная ВТ (косинусная), но при малых углах (порядка 5 град с точностью до 0, 1%) ее можно считать линейной. Статическая характеристика может отклоняться от синусности из-за технологических и конструктивных факторов. Эта погрешность для разных СКВТ составляет 0, 02…0, 2%. Точность измерения углов СКВТ довольно высока, для некоторых типов трансформаторов погрешность ±2I…3I. В динамике ВТ можно рассматривать безинерционные звенья. Недостаток: низкая помехозащищенность, необходимость в питании переменным током, высокая стоимость.
-коэффициент трансформации. Статическая характеристика синусная ВТ (косинусная), но при малых углах (порядка 5 град с точностью до 0, 1%) ее можно считать линейной. Статическая характеристика может отклоняться от синусности из-за технологических и конструктивных факторов. Эта погрешность для разных СКВТ составляет 0, 02…0, 2%. Точность измерения углов СКВТ довольно высока, для некоторых типов трансформаторов погрешность ±2I…3I. В динамике ВТ можно рассматривать безинерционные звенья. Недостаток: низкая помехозащищенность, необходимость в питании переменным током, высокая стоимость.
Резольвер -это специальная электрическая машина переменного тока, у которого определенным образом включены статорные и роторные обмотки. Схема ротора с двухфазной статорной и однофазной роторной обмоткой. Статорные обмотки взаимно перпендикулярны.

Между напряжением на роторной и статорной обмотках имеется следующая взаимосвязь.  (1), где КТ- коэффициент трансформации, φ -угол поворота ротора. Если на статорной обмотке подавать синусоидальное напряжение с одинаковыми амплитудами и фазовым сдвигом π /2, то
(1), где КТ- коэффициент трансформации, φ -угол поворота ротора. Если на статорной обмотке подавать синусоидальное напряжение с одинаковыми амплитудами и фазовым сдвигом π /2, то  ;
;  . В соответствие с выражением 1 можно записать, что
. В соответствие с выражением 1 можно записать, что 
Фазовый сдвиг напряжения в обмотках статора соответствует углу поворота ротора j, который связан с объектом измерения. Резольверы используются в качестве датчиков обратной связи в цифровых системах управления.
Индуктосин -это датчик, используемый для измерения линейных перемещения. Его принцип действия тот же, как и у резольвера.

Сельсин -используется для измерения угла, представляет собой электрическую машину с однофазной обмоткой возбуждения на роторе, питаемой переменным напряжением возбуждения Uв и трехфазной статорной обмоткой.
Поле ротора наводит в обмотках фаз статора ЭДРС переменного тока, частота которого равна частоте питания Uв, а величина напряжения зависит от положения ротора. в системах ЭП сельсины работают в трансформаторном режиме и содержат элементы сельсин-датчик и сельсин-приемник.

Переменное напряжение Uв подается в обмотку ротора Д. Обмотки статоров датчика и приемника соединены. ЭДС, наводимая в фазах датчика, зависящая от положения ротора, создает токи в обмотках фаз статора приемника. В результате в зависимости от положения ротора приемника в нем индуцируется ЭДС. Таким образом, на выходе получается напряжение, которое зависит от угла рассогласования: Uвых=Umax·sin(b-a). При согласовании положения роторов датчика и приемника напряжение на выходе Uвых=0. Существуют контактные и бесконтактные конструкции сельсинов. Статическая характеристика при малых углах рассогласования близка к линейной. Чувствительность их 1В/град, погрешность измерения γ ± 20-30 минут, в динамике сельсины аналогичны безинерционным звеньям.
|
|