Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Работа радиовысотомера ПРВ-13 по обеспечению боевых действий зенитных ракетных войск и истребительной авиации при сопряжении с комплексами средств автоматизации.
|
|
Радиовысотомер ПPB-13 для обеспечения боевых действий ЗРВ и ИА напрямую не сопрягается с их автоматизированными системами. Выдача информации в цифровом виде о локационных воздушных объектах (в том числе по высоте) осуществляется через современные КСА РТВ. Радиовысотомер ПРВ-13 может быть сопряжен со следующими современными КСА РТВ:
- в автоматизированной системе «Пирамида» – с КСА 86Ж6 «Поле» (КСА ПУ рлр) и КСА 5K60 «Основа» (КСА КП ртб);
- в унифицированном ряде КСА «Фундамент» – с элементами этой системы автоматизации: ПУ рлр (97Ш6) и КП ртб (98Ш6) через модуль съёма 46С6.
Кроме того, информация о высоте локационных воздушных объектах может быть снята и выдана в автоматизированные системы управления через автоматизированный комплекс съема информации КП – выносной индикаторный пост ВИП-117М или его более новые модификации.
3.7.1. Работа радиовысотомера ПРВ-13 при сопряжении с комплексом средств автоматизации автоматизированной системы «Пирамида»
Программа управления радиовысотомерами центральным вычислительным комплексом (ЦВК) КСА 5K60 рассчитана на управление 12 радиовысотомерами (любых типов), а спецвычислителем (СВ) 86Ж6 – 2ПРВ (любых типов). Кроме автоматического (основного) способа управления, предусмотрено:
- полуавтоматическое управление в боевом и тренажном режимах с выдачей ЦУ (ЦУ) радиовысотомеру (РВ) с рабочего места (РМ) операторов съема плоскостных координат, при этом координаты задаются маркером оператора;
- ручное управление в аварийном режиме с использованием штурвалов на лицевой панели блоков устройства управления высотомером (УУВ).
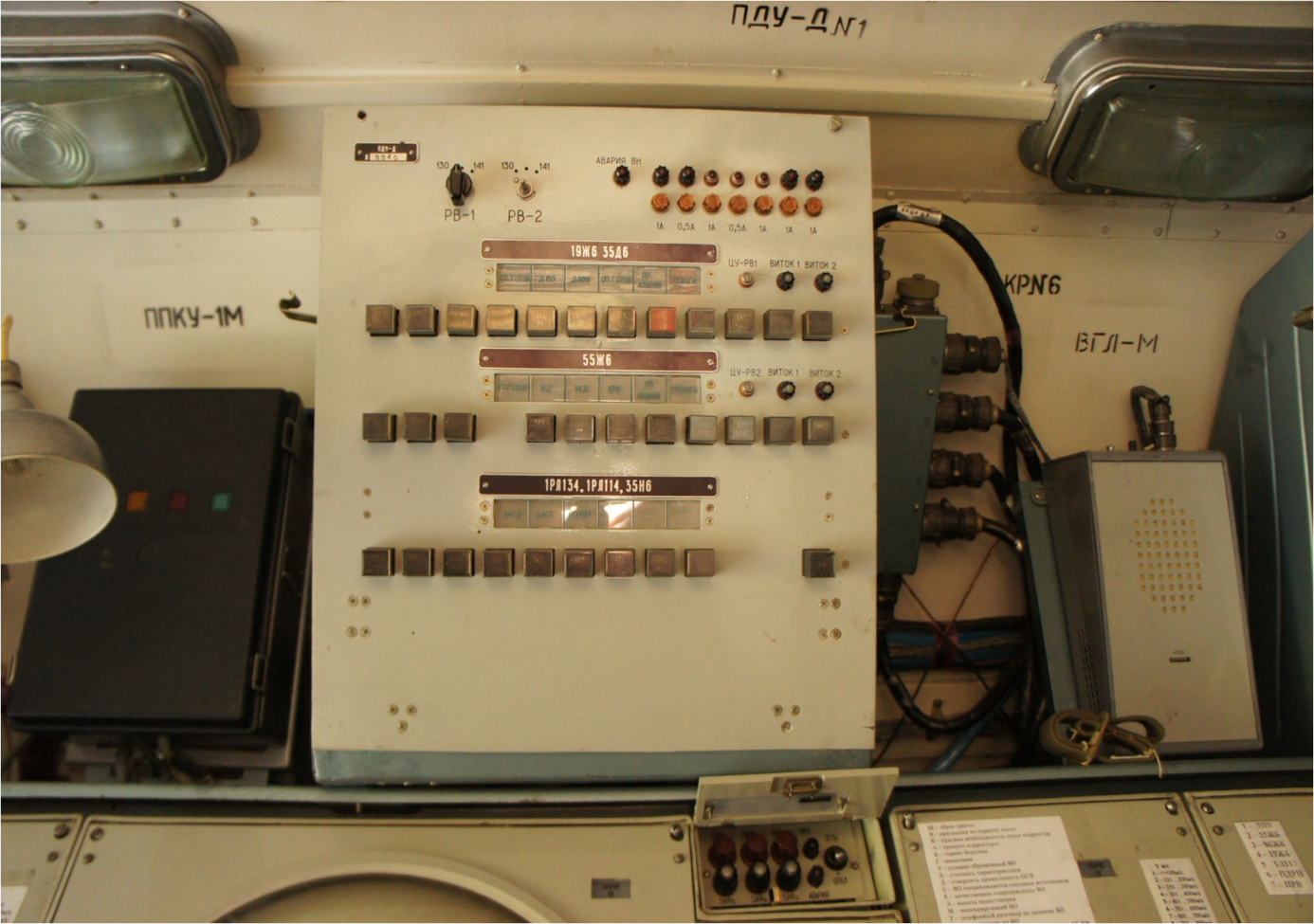
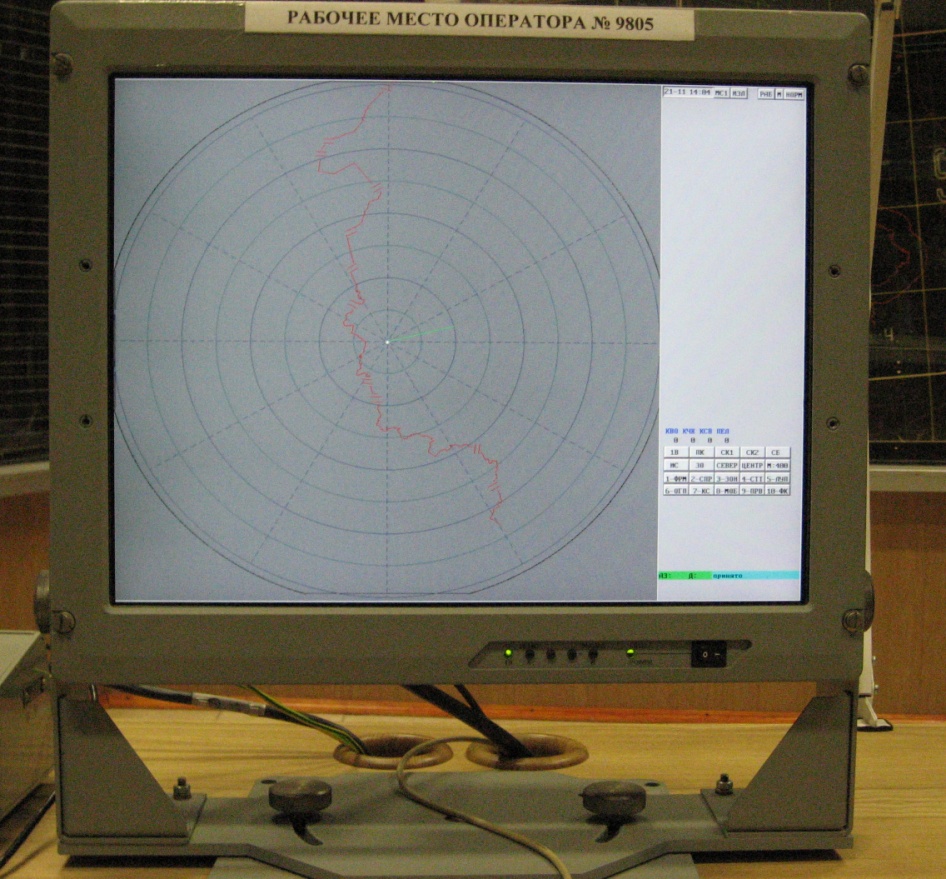
Съём высоты осуществляется с РМ КСА – АРМ -5 (рис. 24). Команды управления «Включение» и «Выключение» высокого, режимы работы радиовысотомеров осуществляются с ПДУ-Д № 3 (рис. 25), расположенного над АРМ-5.

|
|
| Рис. 24. Рабочее место № 5 КСА 86Ж6 | Рис. 25. ПДУ-Д КСА 86Ж6 |
Управление радиовысотомерами с РМ КСА заключается в автоматическом развороте на азимут ВО, по которому необходимо измерить высоту, а также во включении и выключении излучения передатчика радиовысотомера.
Работа оператора радиовысотомера ПРВ-13 при сопряжении с КСА автоматизированной системы «Пирамида» на своём рабочем месте (за индикаторным шкафом И-7) заключается:
- в его своевременном включении и выключении;
- контроле работоспособности всех систем в процессе боевой работы;
- своевременном включении режимов защиты от помех, исходя из складывающейся воздушной обстановки;
- установке необходимых режимов обзора воздушного пространства;
- включении средств объективного контроля для отчёта о проведеной боевой работе.
3.7.2. Работа радиовысотомера ПРВ-13 при сопряжении с унифицированным рядом комплекса средств автоматизации «Фундамент»
Сопряжение радиовысотомера ПРВ-13 с элементами унифицированного ряда КСА «Фундамент» осуществляется модулем съема и обработки информации (рис. 26) 46С6-1 (МСС) через коробку сопряжения КС-РЛС (рис.27). К одному изделию МСС 46С6-1 возможно подключение до 2 ПРВ любых типов с одновременной их работой по выдаче высоты ВО на КСА «Фундамент».
Взаимодействие изделия 46С6-1 с радиовысотомером ПРВ-13 основывается на следующих основных принципах:
- включение и выключение радиовысотомера ПРВ-13, управление всеми его основными режимами осуществляется на самом радиовысотомере;
- изделие взаимодействует только с боеготовыми и включенными радиовысотомерами ПРВ-13 (признак боеготовности и включения вводится с АРМ изделия);
- внешнее управление радиовысотомером ПРВ-13 по азимуту осуществляется с изделия по сопровождаемым трассам ВО;
- команды на управление радиовысотомером ПРВ-13 по азимуту не вырабатываются: по пеленгам, первым вводам, тренажным трассам, трассам, находящимся на дальности более 400 км;
- выдача на изделие данных по высоте (в виде уровня напряжения) осуществляется оператором радиовысотомера ПРВ-13;
- выдача изделием маркера ЦУ по дальности на радиовысотомер ПРВ-13 производится автоматически в момент выдачи на него ЦУ по азимуту;
- изделие сопрягается с радиовысотомером ПРВ-13 через коробку сопряжения КС-РЛС, все сигналы сопряжения проходят через коробку КС-РЛС;
- сопряжение с радиовысотомером ПРВ-13 осуществляется через его штатные блоки, при этом индикаторные шкафы из прицепов не выносятся, а подключаются на месте. Индикаторы кругового обзора радиовысотомера ПРВ-13 в данном сопряжении не используются;
- с одним изделием одновременно могут работать до двух радиовысотомеров ПРВ-13. Сопряжение с ними производится кабелями сопряжения, которые входят в комплект изделия 46С6-1;
- радиовысотомер ПРВ-13 работает в режиме внешнего запуска от изделия;
- управление радиовысотомером ПРВ-13 по азимуту производится с использованием трехфазной двухканальной системы ССП ПРВ;
- питание потенциометра маркера высоты, расположенного на радиовысотомере ПРВ-13, осуществляется от изделия 46С6-1.
| 
|
| Рис. 26. Модуль съема и обработки информации аналоговых РЛС 46С6-1 | Рис. 27. Коробка КС-РЛС сопряжения аналоговых РЛС с МСС 46С6-1 |
При функциональном взаимодействии изделия 46С6-1 с радиовысотомером ПРВ-13 на нем решаются следующие основные задачи:
- вывод боеготового радиовысотомера ПРВ-13 на заданный азимут;
- автоматическая выдача оператору радиовысотомере ПРВ-13 маркера по дальности в момент выдачи ЦУ;
- получение от радиовысотомера ПРВ-13 напряжения, пропорционального высоте, и автоматическое преобразование его в цифровое значение;
- автоматическая выдача на боеготовый, но занятый обслуживанием цели радиовысотомер ПРВ-13, повторного ЦУ (ЦУП). Повторный вывод радиовысотомера ПРВ-13 на заданный азимут и выдача маркера по дальности производится при отсутствии с радиовысотомера ПРВ-13 съема высоты в течение 30 с;
- автоматическое освобождение радиовысотомера ПРВ-13 от цели при съеме высоты или отсутствии съема высоты более 30 с по ЦУП и установка в формуляр ВО признака недостоверности высоты;
- автоматическая установка в формуляр трассы ВО признака недостоверности высоты при получение от радиовысотомера ПРВ-13 команды «Отказ от ЦУ».
Программное обеспечение изделия позволяет оператору АРМ организовать управление радиовысотомерами по азимуту в автоматическом и полуавтоматическом режиме.
Включение в работу алгоритмов управления радиовысотомера ПРВ-13 производится оператором изделия вводом с АРМ признака боеготового и включенного состояния по каждому подключенному к изделию радиовысотомеру ПРВ-13. В случае если признак не введен или он введен по не включенному радиовысотомеру ПРВ-13, то ЦУ на исправный радиовысотомер ПРВ-13 вырабатываться не будут.
Автоматический выбор очередной трассы ВО для измерения высоты осуществляется изделием 46С6-1 по определенной программе, которая выбирает наиболее приоритетную и свободную от выдачи ЦУ трассу.
Приоритет трассы для измерения высоты определяется по времени «необновления» высоты в формуляре трассы ВО. Приоритет увеличивается в следующих случаях:
- трасса не имеет ни одного измерения высоты ВО;
- высота ВО в составе трассы не достоверна;
- по трассе ВО поступило распоряжение от КСА 46С6-1 «Измерить высоту» (ИВ);
- по трассе ВО поступило распоряжение от оператора изделия 46С6-1 «Измерить высоту» (ИВ).
При равенстве приоритетов выбирается ВО с меньшим номером трассы.
Для разворота антенны радиовысотомера ПРВ-13 на азимуты выбранных трасс необходимо присутствие на изделии 46С6-1 напряжений грубого (ГО) и точного (ТО) отсчетов, поступающих от радиовысотомера. Для их формирования с изделия 46С6-1 на радиовысотомер ПРВ-13 передаются опорные напряжения частотой 400 Гц. Из полученных от каждого радиовысотомера ПРВ-13 напряжений ГО и ТО на изделии 46С6-1 формируются сигналы рассогласования (управления) РГО и РТО и они передаются на радиовысотомеры. Эти сигналы, после усиления на радиовысотомере ПРВ-13, управляют разворотом его антенной системы по азимуту.
В момент выдачи радиовысотомеру ПРВ-13 ЦУ с изделия 46С6-1 на индикаторе высоты ИВ-06М автоматически высвечивается маркер ЦУ по дальности.
Оператор радиовысотомера ПРВ-13 по индикатору высоты ИВ-06М должен обнаружить на дальности маркера отметку от цели, вывести на середину этой отметки маркер высоты (вращая нимб датчика маркера высоты) и кратковременно нажать на переключатель «ВЫДАЧА ДАННЫХ (СЪЁМ ВЫСОТЫ)». Этим он дает сигнал на изделие 46С6-1 о том, что высота цели определена (напряжение, пропорциональное высоте, выставлено) и разрешает изделию 46С6-1 снять, поступающее с движка потенциометра постоянное напряжение, пропорциональное высоте.
После съема высоты изделие 46С6-1 обрабатывает напряжение, пропорциональное высоте, и выполняет обновление значения высоты в формуляре ВО. Алгоритм изделия 46С6-1 выполняет освобождение радиовысотомера ПРВ-13 от цели и задает ему новую цель. В дальнейшем цикл работы повторяется.
В случае недостаточного вывода радиовысотомера ПРВ-13 на цель по азимуту или «проскока» антенны мимо цели оператор радиовысотомера ПРВ-13 должен произвести поиск цели в пределах ± 3° от среднего значения, отработанного антенной. Если цели на указанной дальности не обнаружено, то оператор радиовысотомера ПРВ-13 нажимает на переключатель «ОТКАЗ ОТ ЦУ». При этом на изделие 46С6-1 от радиовысотомера ПРВ-13 поступает напряжение постоянного уровня, при получении которого, изделие 46С6-1 производит автоматическую установку в формуляр трассы ВО признака недостоверности высоты и выдачи ЦУ по очередному ВО.
В зависимости от складывающейся обстановки оператор изделия имеет возможность прервать процесс автоматического назначения очередного ВО для определения высоты и ввести команду на внеочередное измерение высоты по ВО, назначенному оператором изделия.
|
|