Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Динамическая модель машинного агрегата (звено приведения). Приведение моментов инерции.
|
|
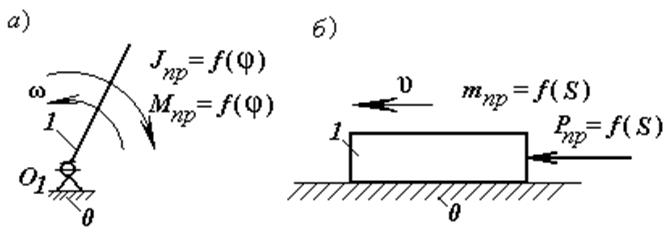
Динамическая модель механизма, или машины представляет собой уравнение движения звена приведения, к которому приведены все силы и массы звеньев. В случае, если звено приведения совершает вращательное движение (например, кривошип, рис. 1, а) то уравнение движения принимает вид:
 где Jпр – приведенный момент инерции звена приведения; Мпр – приведенный момент сил звена приведения.
где Jпр – приведенный момент инерции звена приведения; Мпр – приведенный момент сил звена приведения.
Рисунок 1.
В случае, если звено приведения совершает поступательное движение (ползун, рис. 1, б) уравнение движения имеет вид:

где mпр – приведенная масса звена приведения;
Рпр – приведенная сила звена приведения.
Приведенным моментом инерциии Iп – называется такой условный момент инерциии, которым должно обладать звено приведения, чтобы его кинетическая энергия Тп равна сумме кинетических энергий всех звеньев машины
Тп=Σ Тi
для вращающего звена приведения
откуда
Приведенный момент инерции Iп представляет в виде:

где  постоянная составляеющая приведенного момента инерции
постоянная составляеющая приведенного момента инерции
|
|