Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Разработка алгоритма программного управления
|
|
Разработка блок-схемы алгоритма управления осуществляется на основе неформального содержательного описания процесса функционирования объекта. В общем случае содержательное описание должно включать в себя перечень возможных или допустимых режимов работы агрегата, перечень исполнительных механизмов, схему их взаимодействия, последовательность включения-отключения; перечень органов управления; перечень датчиков; перечень требуемых информационных и диагностических сигналов о работе оборудования; необходимые указания в части обеспечения электрических блокировок при срабатывании отдельных механизмов и узлов, а также перечень контролируемых и регулируемых параметров технологического процесса, реализуемого на данном оборудовании.
Рассмотрим технологию разработки алгоритма на примере фрагмента роботизированного технологического комплекса, рис. 5.1.

Рис. 5.1 Фрагмент роботизированного технологического комплекса
В соответствии с представленной технологической схемой необходимо разработать алгоритм программного управления движением промышленного робота (ПР), который должен осуществлять разгрузку технологического агрегата (ТА) по мере изготовления на нем деталей, что фиксируется датчиком SQ1, установленным на поз. разгрузки " Р", и выгрузку их на конвейер (К), что фиксируется датчиком SQ2, установленным на поз. загрузки " 3".
Положение каретки ПР на портале фиксируется датчиками положения SQ3 и SQ4, установленными над позициями " Р" и " 3" соответственно. Нижнее и верхнее положение схвата ПР фиксируется с помощью датчиков SQ7 и SQ8, а сжатие и разжатие схвата контролируется с помощью датчиков SQ5 и SQ6.
Вертикальное перемещение схвата осуществляется при помощи электропривода ЭП1, перемещение каретки по порталу - при помощи электропривода ЭП2 а сжатие - разжатие схвата - при помощи электропривода ЭПЗ.
При разработке алгоритма программного управления необходимо учитывать также ряд специальных технических требований и требований, связанных с обеспечением безопасности обслуживающего персонала, а именно:
• запрещается горизонтальное перемещение каретки ПР в случае, если схват находится не в верхнем положении;
• запрещается опускание схвата над позицией разгрузки ТА при сжатом состоянии схвата;
• выполнение каждой последующей технологической или транспортной операции разрешается только после контроля выполнения предыдущей;
• состояние схвата исходное и при отключении электропитания -сжатое (за счет механической пружины);
• нарушение выше перечисленных требований должно автоматически диагностироваться в режиме " жесткого" реального времени.
При выявлении запрещенного движения последнее должно автоматически прекращаться, при этом должна также выдаваться сигнальная информация для обслуживающего персонала.
Блок-схема алгоритма программного управления приведена на рис.5.2. Операторы 2 и 3 проверяют, находятся ли в режиме АВТОМАТИКА объекты управления (ТА, К). Оператор 4 проверяет наличие полуфабриката на ТА, а оператор 5 - отсутствие полуфабриката на К. В связи с тем, что перемещение ПР в зоне обслуживания ТА и К разрешается при условии, что схват ПР находится вверху, оператор 6 проверяет выполнение этого условия и, если схват не находится вверху, оператор 7 обеспечивает подъем схвата. После того, когда схват поднимется вверх, оператор 8 отключит его подъем. Затем необходимо проверить, находится ли ПР над ТА (оператор 9) и, если нет, - то включить привод движения ПР влево (оператор 10) и выключить его (оператор 11), когда ПР наедет на конечный выключатель SQ3. Перед тем, как опускать схват вниз, обязательно необходимо проверить, разжат ли он (оператор 12), в противном случае при опускании схвата может про изойти повреждение схвата или полуфабриката; если схват сжат, то оператор 13 обеспечит его разжатие, а оператор 14 - включение привода опускания схвата. Оператор 15 проверяет, опустился ли схват (то есть проверяется срабатывание конечного выключателя SQ8) и, если схват находится внизу, опускание схвата прекращается (оператор 16). Затем включается сжатие схвата (оператор 17). После проверки сжатия схвата (оператор 18) включается подъем схвата (оператор 19). После проверки того, что схват поднят вверх (оператор 20), привод подъема схвата выключается (оператор 21) и включается привод движения ПР вправо (оператор 22). Оператор 23 проверяет, доехал ли ПР до К (по срабатыванию конечного выключателя SQ4), а оператор 24 обеспечивает отключение привода движения ПР вправо. Далее включается опускание схвата (оператор 25), которое выключается оператором 27, если схват опустился вниз (оператор 26). Оператор 28 обеспечивает разжатие схвата, а оператор 29 контролирует выполнение этой операции, после чего включается подъем схвата (оператор 30), который отключается (оператор 32) после проверки (оператор 31) того, что схват находится вверху.
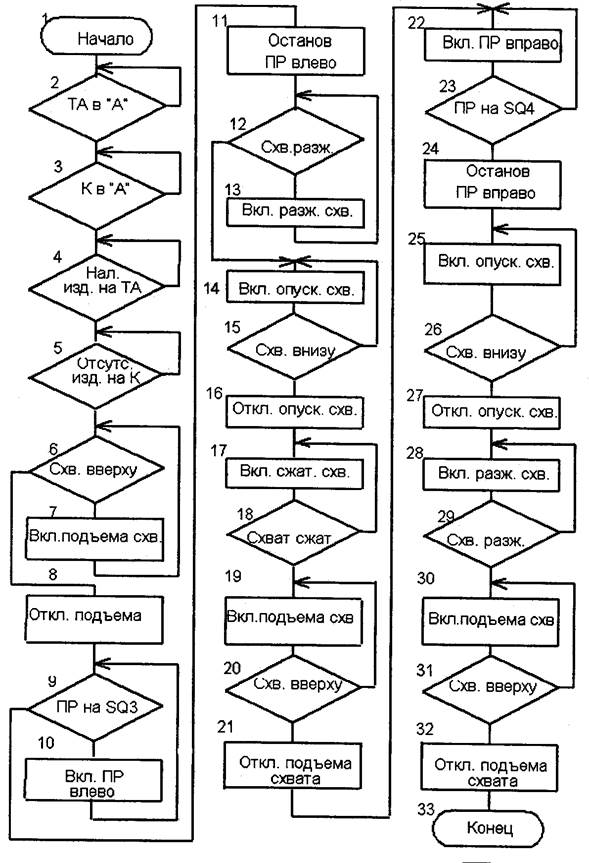
Рис.5.2 Блок схема алгоритма программного управления
|
|