Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Качество системы регулирования
|
|
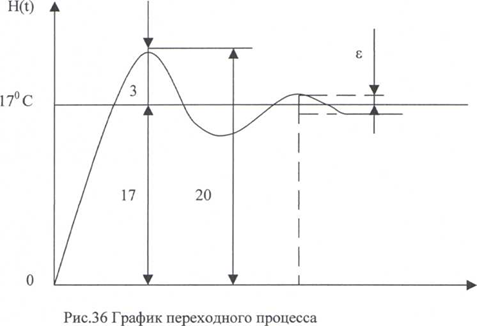
Для контура регулирования температуры в данном случае наиболее оптимальным будет переходный процесс имеющий большое регулирующее воздействие; небольшое динамическое отклонение; степень затухания ¥ =0, 96; минимальное время первого полу периода колебаний; вид переходного процесса с двадцати процентным пере регулированием, то есть с отношением двух соседних амплитуд колебаний GI/O2=0, 2.
Но этот процесс так же будет иметь отрицательную характерную особенность: большое время регулирования.
График переходного процесса: смотри рис. График переходного процесса.
5.3. Расчёт оптимальных параметров настройки систем регулирования
В результате обработки экспериментальной переходной характеристики (канала регулирования) температуры на левом и правом водоводах, получены следующие данные параметров, характеризующие динамические свойства объекта.
Коб=2, 5; Тоб=2мин.; тоб=1, 5мин.; т0=0, 5 мин.
Для этого вначале дают приблизительную оценку динамическим свойствам объекта. Если подать на вход объекта ступенчатый сигнал Ах, то на выходе
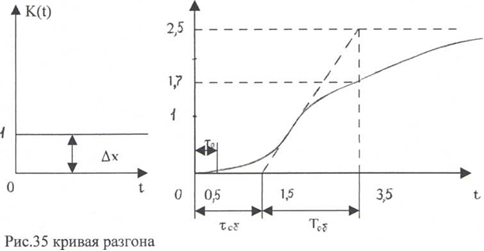
получится так называемая кривая разгона, которая для объекта с самовыравниванием имеет вид:
Объект опраксимируется двумя элементарными звеньями, соединёнными последовательно. Кривая разгона объекта с самовыравниванием опраксимируется определённым звеном и звеном чистого запаздывания согласно передаточной функции.

Звенья опроксимирующие объект
Т0б*р +1
К объекту с самовыравниванием может подключаться регулятор любого типа. При необходимости получения небольших значений пере регулирования и плавном изменении возмущений можно применять П- регулятор, в моём случае допускается статическая ошибка.
Расчёт ведём по приближённым формулам; при этом процесс регулирования выбираем с двадцати процентным перерегулированием.
Это обеспечивает меньшую динамическую ошибку, чем в апериодическом процессе, но большее время регулирования.
Вывод: для обеспечения двадцати процентного пере регулирования выбираем следующие оптимальные настройки регулятора Кр=0, 37
|
|