Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Экскаваторы, оборудованные драглайном.
|
|
Для разработки грунта на больших глубинах и при большом радиусе действия применяют экскаваторы, оборудованные драглайном. В отличие от прямой и обратной лопат ковш драглайна не укрепляется жестко на рабочем оборудовании, а подвешивается на двух канатах: подъемном и тяговом при помощи блоков, цепей подвески и разгружающего каната.
Радиус действия увеличивается в результате отсутствия жесткой связи ковша со стрелой, уменьшающей нагрузки стелы. Это позволяет установить на экскаваторе стрелу (обычно решетчатую) в 2…2, 5 раза длиннее, чем при оборудовании лопатой. Ковш драглайна для копания и разгрузки может выбрасываться в перёд на несколько метров.
Мощные шагающие драглайны используют для добычи полезных ископаемых открытым способом и на вскрышных работах. Отечественной промышленностью выпускаются строительные драглайны с ковшами 0, 3…3м  , а шагающие драглайны – от 5, 45 до 100м
, а шагающие драглайны – от 5, 45 до 100м
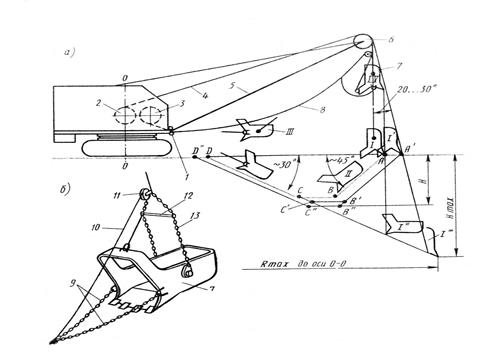
Рабочее оборудование драглайна включает стрелу 5 обычно решетчатой, реже винтовой конструкции (шагающие драглайны), по длине значительно превышающую стрелу лопаты, ковш 7, тяговый 8 и подъемный 4 канаты. Последний огибает головной блок 6 и навивается на барабан 2 подъемной лебедки. Тяговый канат направляется роликовым устройством 1 и навивается на барабан 3 тяговой лебедки. Ковш подвешивают к тяговому канату цепями 9, а к подъемному канату – цепями 13. Чтобы подъемные цепи не препятствовали свободному перемещению ковша при разгрузке, между ними ставят распорку 12. На ковше устанавливают также разгрузочный канат 10, зацепляя его одним концом на арке ковша, а вторым – в узле соединения тяговых цепей с тяговым канатом. С подъемными цепями разгрузочный канат соединяется через блок 11, установленный в узле соединения подъемных цепей с подъемным канатом.
Для начала разработки ковш опускают на грунт (положения  ), затем тяговым канатом при ослабленном подъемном канате его перемещают по забою (положение II). После заполнения ковша, не ослабляя тягового каната, подъемным канатом его подтягивают к стреле (положение III), включают поворотный механизм с одновременным перемещением ковша к голове стрелы подъемным и тяговым канатами. В конце этой операции тяговый канат опускают, ковш опрокидывается и разгружается (положение IV). Далее возвратным поворотным движением с одновременным опусканием подъемного и тягового канатов опускают ковш в исходное положение. За счет центробежных сил, возникающих при повороте, подъемный канат отклоняется от вертикали на угол 20…30
), затем тяговым канатом при ослабленном подъемном канате его перемещают по забою (положение II). После заполнения ковша, не ослабляя тягового каната, подъемным канатом его подтягивают к стреле (положение III), включают поворотный механизм с одновременным перемещением ковша к голове стрелы подъемным и тяговым канатами. В конце этой операции тяговый канат опускают, ковш опрокидывается и разгружается (положение IV). Далее возвратным поворотным движением с одновременным опусканием подъемного и тягового канатов опускают ковш в исходное положение. За счет центробежных сил, возникающих при повороте, подъемный канат отклоняется от вертикали на угол 20…30  , благодаря чему достигается больший радиус заброса ковша в исходное положение (положения
, благодаря чему достигается больший радиус заброса ковша в исходное положение (положения  ).
).
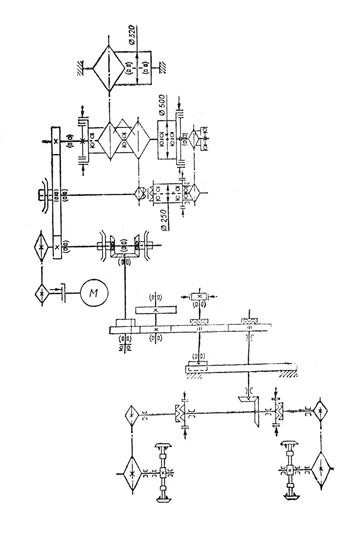
Кинематическая схема экскаватора ЭО-4111Б (Э-652Б).
I – вал двигателя;
II – горизонтальный вал реверсивного механизма;
III – вал стрелоподъемного механизма;
IV – вал главной лебедки;
V – вертикальный вал реверсивного механизма;
VI – вертикальный вал поворота платформы;
VII – вертикальный вал механизма передвижения;
VIII – горизонтальный вал механизма передвижения.
А – главная муфта;
Б – реверсивный механизм;
В – стрелоподъемный барабан;
Г – подъемный барабан;
Д – ленточный фрикционный привод напорного барабана;
Е – зубчатый венец поворота платформы;
Ж – гусеничный ход;
М – мотор.
Исходные данные:
ЭО – 4111Б (Э – 652Б) с оборудованием – драглайн
n = 920
Изучается механизм передвижения данного экскаватора.
Расчет:
Уравнение кинематической цепи для данного механизма будет:


Устанавливаем наличие цепной передачи:
Передача реверсивного механизма:
Зацепление зубчатых колес:
Приведение во вращение шестерню:
Цилиндрическая передача:
Конусная фрикционная муфта:
Гусеничные цепи:
Подставляя значения nдв и z, получим число оборотов:


Подставляя значения nx1 и nx2 находим скорость передвижения экскаватора:



|
|