Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Режими роботи та функції систем числового програмного управління
|
|
Організація функціонування системи ЧПУ. Можливості по організації різних варіантів функціонування системи ЧПУ технологічного устаткування нижнього виконавчого рівня управління ГВС подані у вигляді узагальненої структурної схеми на рис. 5.15.
На схемі як основні елементи зазначені:
ТОУ – технологічний об’єкт управління (робочий процес виготовлення деталі);
Д – датчики вимірювання та контролю величин і параметрів, зокрема, Д1, Д2 – датчики вимірювання вхідного інформаційного потоку X, Д3 – датчики вимірювання вихідного інформаційного потоку Y;
ВМ – виконавчі механізми;
Р – роботи, що працюють за власною програмою і мають систему адаптації;
М – маніпулятор (елементи відпрацювання траєкторій);
К – контролер;
ПЗО – пристрій зв’язку з об’єктом;
ІУОК – інформаційно-управляючий обчислювальний комплекс;
ПВІ – пристрій відображення інформації;
ПВВІ – пристрій введення-виведення інформації;
ПЗВР – пристрій зв’язку з верхнім рівнем управління;
Z – вектор збурення, яке впливає на процес функціонування ТОУ.
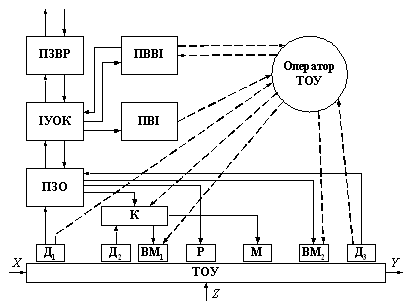
Рис. 5.15. Узагальнена схема функціонування пристрою ЧПУ
Дана структурна схема узагальнює існуючі режими і структури їх реалізації на нижньому виконавчому рівні управління ГВС.
Розрізняють три основні режими роботи системи ЧПУ верстата: автоматичний, напівавтоматичний і ручний.
Автоматичний режим роботи приймається як основний режим роботи технологічного устаткування з ЧПУ, який реалізується через централізовану структуру управління. Ця структура дозволяє здійснювати управління технологічним об’єктом у двох підрежимах (варіантах реалізації): безпосереднього цифрового управління і супервізорного управління.
Безпосереднє цифрове управління здійснюється через структуру, що припускає знімання інформації з датчиків Д1 і Д3, передачу її через ПЗО в ІУОК для обробки даних за відомими алгоритмами і програмами з наступною видачею через ПЗО на ВМ2 і Р керуючого впливу. Дана структура має переваги по забезпеченню кращих динамічних властивостей управління і більшої адекватності прийнятих рішень. Однак, як недолік необхідно зазначити низьку надійність управління через сильну централізацію при виробленні рішень єдиним органом – ІУОК. Вихід з ладу ІУОК призводить до відмови у роботі всієї системи ЧПУ.
Супервізорне управління вносить корективи у процедуру реалізації прийнятих рішень і припускає, що після знімання інформації з датчиків і обробки її в ІУОК відбувається вироблення завдань на проміжні ланки управління – контролери К. Кожен контролер має ряд власних програм реалізації заданих законів управління (для вироблених ІУОК рішень) або програм функціональних перетворень заданих величин за визначеними критеріями. Контроль за ходом реалізації завдання покладається на сам контролер, який контролює виконання маніпулятором М та виконавчим механізмом ВМ1 команд керування через датчик Д2. В результаті управління здійснюється через структуру зі зворотним зв’язком. Переваги такої структури полягають в тому, що у випадку відмови ІУОК поточне управління продовжується, а вироблення нових рішень можливе, але з погіршенням показників функціонування, тобто основні функції управління зберігаються. Недоліком є те, що через наявність додаткової ланки в прийнятті рішень по управлінню погіршується його динаміка і знижуються функціональні можливості через низькі обчислювальні потужності контролерів.
Напівавтоматичний режим роботи приймається як додатковий режим роботи технологічного устаткування з ЧПУ, що реалізується через децентралізовану структуру управління. Ця структура дозволяє здійснювати управління технологічним об’єктом у двох підрежимах (варіантах реалізації): підтвердження рішень по управлінню та прийняття рішень по управлінню. Основним елементом даної структури є оператор, який приймає остаточне рішення по управлінню та розширює можливості супервізорного режиму управління.
Підрежим підтвердження рішення припускає знімання інформації з датчиків Д1 і Д3, передачу її через ПЗО в ІУОК, який виробляє чергове рішення у відповідності із ситуацією, що складається на ТОУ. Вироблене рішення через ПВІ доводиться до оператора, який через ПВВІ підтверджує це рішення і дає команду ІУОК на його реалізацію в супервізорному режимі.
Підрежим ухвалення рішення відрізняється від першого тим, що оператор взаємодіє з ІУОК в інтерактивному (ітераційному) режимі ухвалення рішення, що припускає вироблення ІУОК декількох можливих варіантів рішень. Оператору через ПВВІ необхідно зробити вибір з підготовлених рішень або вказати ІУОК провести їх повторний пошук. Відпрацьовування вибраного оператором рішення реалізується ІУОК у супервізорному режимі.
Ручний режим роботи приймається як допоміжний (відлагоджувальний, перевірочний, діагностичний) режим роботи технологічного устаткування з ЧПУ. Даний режим роботи системи ЧПУ припускає використання тільки елементів реєстрації інформації з ТОУ: датчиків Д1 і Д3, оператора як органу управління та елементів виконання рішень: контролерів К, виконавчих механізмів ВМ1, ВМ2. У цьому режимі оператор безпосередньо сприймає первинну інформацію від датчиків, оцінює ситуацію, приймає рішення та реалізує його безпосереднім впливом на К або ВМ. Якщо використовується К, то оператор встановлює йому відповідне виробленому рішенню завдання.
Оскільки розглянуті структури управління функціонують у складі інтегрованої системи управління, то передбачається інформаційний обмін між різними рівнями. Такий обмін здійснюється через ПЗВР як з підсистемами верхнього рівня, так і з підсистемами того ж рівня управління.
Функції системи ЧПУ. Основні функції системи ЧПУ (рис. 5.16) можна поділити на три види: цифрове управління; вимірювання та контроль; допоміжні. Мікропроцесорний пристрій ЧПУ можна розглядати як обчислювальну машину, що перетворює управляючу програму, написану мовою користувача, у програму мовою машини для управління виконавчими механізмами і зв’язку з оператором.
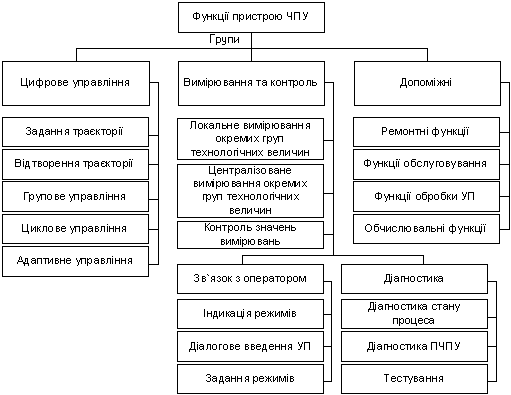
Рис. 5.16. Основні функції системи ЧПУ
У групу функцій цифрового управління, що відповідає перетворенню УП у сигнали управління виконавчими механізмами, входять функції задання траєкторії з розрахунком еквідістанти та інтерполяція (дискретне управління виконавчими механізмами), відстеження правильності відтворення виконавчими механізмами траєкторії по всіх координатах робочого органу (автоматичне і багатоконтурне управління окремими параметрами об’єкта), управління електроавтоматикою допоміжних механізмів (групове управління одиницями устаткування), циклове управління, адаптивне управління режимами різання.
Другу групу функцій системи ЧПУ складають функції, що забезпечують проведення вимірювань та контролю стану технологічного об’єкта управління і підтримки зв’язку з оператором. До них відносять: локальне вимірювання окремих і централізоване вимірювання груп технологічних величин, контроль значень вимірювання, діагностика стану об’єкта і системи управління, підготовка і видача на засоби відображення інформації зведень про хід технологічного процесу, сигналізація про порушеннях технологічного процесу, прогнозування стану і поводження об’єкта і системи управління, підготовка і передача повідомлень у суміжні системи управління.
Допоміжні функції сприяють нормальному протіканню технологічного процесу і реалізації функцій управління та контролю. До цих функцій відносять групи: обробки УП, ремонтні функції, функції обслуговування, постачання, обчислювальні функції.
Групу функцій обробки УП складають функції, що залежать від способу підготовки УП. У системах ЧПУ розрізняють три основних способи підготовки УП:
– аналітичний спосіб, в якому текст УП спеціальною мовою користувача вводиться у пам’ять ПЧПУ разом з числовими значеннями розмірних переміщень по всіх осях. Такий спосіб програмування одержав переважне поширення у верстатах із ЧПУ;
– безпосереднє навчання, при якому координати точок по всіх осях записуються в пам’ять ПЧПУ після виведення усіх виконавчих механізмів у задану оператором точку. Одночасно записується дискретно-логічна інформація, що задається на пульті управління ПЧПУ, необхідна для обробки УП. Цей спосіб підготовки УП одержав найбільшого поширення в промислових роботах;
– напіваналітичний спосіб підготовки УП, при якому координати точок безупинної траєкторії по всіх осях записуються в пам’ять ПЧПУ в режимі безпосереднього навчання, а потім за допомогою спеціального алгоритму виділяються опорні точки записаної траєкторії. Ділянки траєкторії між опорними точками при відтворенні траєкторії апроксимуються елементарними кривими (прямими або дугами параболи), а проміжні точки виключаються, що призводить до значної економії пам’яті. Цей спосіб підготовки УП використовується в контурних ПЧПУ роботами.
Групу ремонтних функцій складають функції тестування апаратних засобів і програмного забезпечення, діагностики апаратних засобів, а групу функцій постачання – функції забезпечення вихідними матеріалами, комплектуючими, інструментом.
Перераховані функції є результатом розвитку технічних засобів системи ЧПУ.
|
|