Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Типові структурно-компонувальні схеми ГВМ
|
|
ГВМ потенційно орієнтовані на інтеграцію в комплекси чи системи і у цьому зв’язку мають у своєму розпорядженні своєрідний “механічний інтерфейс” для підключення до зовнішнього матеріального потоку заготовок, оброблених деталей та інструмента. Функції подібного інтерфейсу в модулях виконують приймально-передавальні пристрої, способи побудови яких надзвичайно різноманітні.
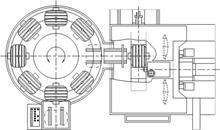
Проте базу компонування ГВМ складає багатофукціональний безпериферійний верстат (рис. 5.5).

Рис. 5.5. Компонування багатофункціонального безпериферійного верстата
Особливістю компонування безпериферійного устаткування є те, що в шпинделі може бути закріплений або нерухомий інструмент (токарний, розточувальний), або обертовий інструмент (свердлильно-фрезерний), причому до складу верстата включено інструментальні магазини. У цьому випадку головний рух виконавчого органу верстата здійснюється або з боку шпинделя (як це робиться традиційно), або з боку стола (як у карусельних верстатах). Таким чином, рух стола С може бути головним або рухом подачі.
Не торкаючись особливостей конструкцій, зупинимося на структурних властивостях приймально-передавальних механізмів ГВМ, призначених для обробки корпусних деталей, встановлених на палетах.
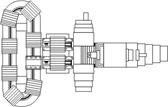
У найпростішому випадку приймально-передавальний механізм представляє собою одномісний висувний пристрій 1 з телескопічним столом або захватним пристроєм (рис. 5.6). Напрямок потоку – завантаження чи розвантаження робочої позиції – встановлюється для показаної на рисунку конструкції шляхом повороту пристрою відповідно у бік робочої позиції чи зовнішнього транспорту. Недоліком такого рішення є порівняно тривалий цикл заміни палети у робочій позиції.

Рис. 5.6. ГВМ з одномісним приймально-передавальним механізмом
У ГВМ, показаному на рис. 5.7, застосований двомісний (на дві палети) приймально-передавальний механізм 1 типу “ліворуч чи праворуч”.

Рис. 5.7. ГВМ з двомісним приймально-передавальним механізмом
Така конструкція, розв’язуючи потоки завантаження та розвантаження робочої позиції, дозволяє тримати в одній з позицій механізму вже підготовлену палету, що скорочує цикл перевантаження. Однак зовнішній матеріальний потік повинен підключатися до позицій завантаження і розвантаження роздільно, що накладає деякі обмеження на конструкцію зовнішніх транспортних засобів.
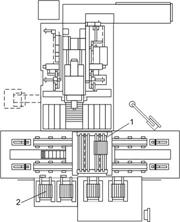
Подальші шляхи руху деталей на палетах (слідом за приймально-передавальним пристроєм) реалізуються по-різному: за допомогою транспортних роликових пристроїв модульного типу через верстатний накопичувач 1 палет (рис. 5.8, а); за допомогою каретки 1 вільної адресації та загального для декількох верстатів нагромаджувача 2 (рис. 5.8, б); за допомогою робокара 1 та центрального нагромаджувача 2 (рис. 5.8, в). Можуть бути використані і змішані варіанти.
Приверстатний нагромаджувач палет (рис. 5.8, а) виконує надзвичайно важливу роль. При автономній роботі ГВМ чи безлюдній роботі у складі ГВС у нічну зміну необхідно виготовити партію заготовок, достатню для беззупинного функціонування без додаткового підживлення і будь-якого втручання оператора протягом заданого часу. Для таких умов обсяг нагромаджувача може бути легко встановлений розрахунковим шляхом, виходячи із загальної тривалості технологічного процесу.
При роботі ГВМ у складі ГВС у денну зміну матеріальні потоки заготовок і деталей відрізняються складним нестаціонарним характером, обумовленим оперативним плануванням запуску деталей у виробництво. У цих умовах верстатні нагромаджувачі здійснюють динамічне згладжування матеріальних потоків, а їх обсяг встановлюється звичайно на основі досвіду чи за результатами імітаційного моделювання гнучкої системи в цілому.

Рис. 5.8. Способи організації потоку деталей на палетах:
а – через приверстатний нагромаджувач; б – за допомогою каретки вільної адресації; в – за допомогою робокара і центрального нагромаджувача
Отже, перевага віддається нагромаджувачам, які забезпечують довільний доступ до будь-якої палети по найкоротшому шляху. У цьому випадку окремим палетам можна призначити різні пріоритети, що запам’ятовуються системою управління, відповідно до яких буде організована послідовна обробка заготовок, що надійшли.
Заготовка, що потрапила до нагромаджувача ГВМ вперше, набуває особливого статусу, відповідно до якого вона може бути оброблена тільки під спостереженням оператора. У безлюдну зміну заготовки з таким статусом, що опинилися у нагромаджувачі, просто ігноруються. Ціль подібного обмеження цілком певна – необхідно переконатися в працездатності вперше використовуваної на даному верстаті управляючої програми ЧПУ.
Гнучкість нагромаджувачів повинна бути передбачена не тільки відносно їх обсягів, але і відносно конфігурацій, для того щоб якнайкраще використовувати виробничу площу або забезпечити розміщення устаткування, що відповідає плану інтегрованої ГВС.
Така вимога може бути задоволена в наступних варіантах конфігурації нагромаджувачів: нагромаджувач з нерухомими палетами (рис. 5.9, а), нагромаджувач з коловим обертанням палет (рис. 5.9, б), еліптичний нагромаджувач з двомісним приймально-передавальним механізмом (рис. 5.9, в).
Якщо приймально-передавальний пристрій встановлений на каретці вільної адресації, то тим самим забезпечується дистанційний доступ до лінійно розташованих нерухомих палет.

а) б)
в)
Рис. 5.9. Варіанти конфігурації нагромаджувачів
Приймально-передавальний механізм каретки 1 може бути одно- (рис. 5.10, а) або двомісним (рис. 5.10, б, в).
Конструкція нагромаджувача 2 може бути закритою (рис. 5.10, б), і у цьому випадку нагромаджувач входить до складу ГВМ. Конструкція нагромаджувача 2 може бути відкритою (рис. 5.10, в), і тоді нагромаджувач є загальним для декількох ГВМ інтегрованої ГВС.

а) б)

в)
Рис. 5.10. Варіанти приймально-передавального механізму з вільною адресацією
У ГВМ, призначених в основному для остаточної автономної обробки невеликих за обсягом і масою деталей, використовують також і системи автоматичної зміни палет вертикального компонування.
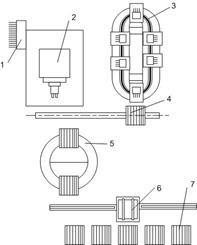
Отже, в результаті виділення наведених класифікаційних параметрів і варіантів складових елементів устаткування верстатів з ЧПУ можна прийняти за типові такі приклади компонувальних схем ГВМ:
– ГВМ з човниковими робочими столами 3 верстата 2 з ЧПУ і інструментальним магазином 1 (рис. 5.11, а);
– ГВМ з автоматизованим завантажувальним пристроєм 3 палет верстата 2 з ЧПУ, інструментальним магазином 1 і кроковим конвеєрним нагромаджувачем 4 (рис. 5.11, б);
– ГВМ з автоматизованою системою зміни інструментів 4 верстата 2 з ЧПУ, нагромаджувача 3 інструментальних магазинів 1, нерухомими палетами 7, двомісним поворотним приймально-передавальним пристроєм 5, завантажувачем палет 6 (рис. 5.11, в).


а) б)
в)
Рис. 5.11. Типові приклади компонування ГВМ
|
|