Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Устройство ПР Циклон – 5
|
|
ПР " Циклон – 5.02 относится к роботам первого поколения, работающим по жесткой циклической программе. Область применения ПР " Циклон – 5.02" - вспомогательные (транспортные) операции при обслуживании штампов (листовая штамповка), в производстве деталей из пластмасс для снятия изделий с литьевых машин и прессов, в литейном производстве.
ПP " Циклон – 5.02" конструктивно состоит из двух частей:
-манипулятора;
-стойки системы управления.
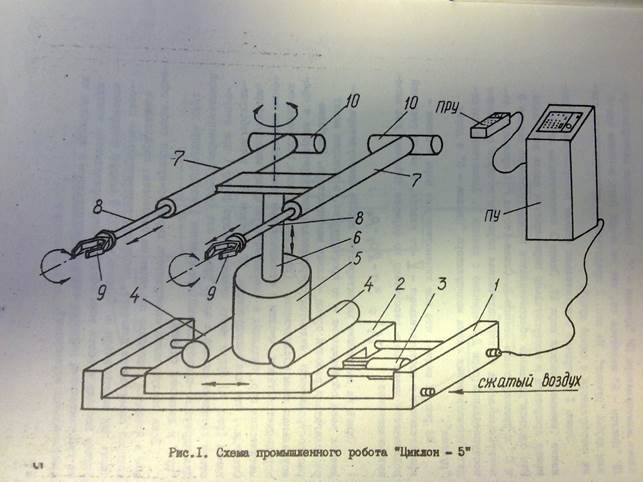
Манипулятор предназначен для непосредственного выполнения операций по перемещению объектов в пространстве. Условная схема манипулятора ПР " Циклон – 5.02" изображена на рис. I. Он состоит из станины I, неподвижно закрепленной на основании, по направляющим элементам которой перемещается платформа 2. Приводит платформу 2 в движение и фиксирует ее в двух крайних положениях пневмоцилиндр 3, Это движение будем называть сдвигом (вправо или влево). На платформе 2 установлена вертикальная штанга б, на верхнем конце которой закреплены две " руки" манипулятора. С помощью комбинации пневмоцилиндров 4 штанга 6 может поворачиваться относительно вертикальной оси и фиксироваться в четырех положениях. Это движение будем называть поворотом (влево, т.е. против часовой стрелки, вправо, т.е. по часовой стрелке, влево или вправо до промежуточного упора). Кроме этого, с помощью пневмоцилиндра 5 штанга 6 может совершать поступательное движение вдоль вертикальной оси с фиксацией в двух крайних положениях (подъем или опускание). " Руки" манипулятора представляют собой пневмоцилиндры 7, на штоках которых закреплены схваты 9, представляющие собой двух пальцевые зажимы, привод которых осуществляется с помощью встроенных малогабаритных пневмоцилиндров. Эти движения будем называть зажимом или разжимом схвата (левого или правого). Пневмоцилиндры 7 могут сообщать каждому из схватов прямолинейное движение с фиксацией в крайних положениях. Эти перемещения будем называть выдвижением вперед или убиранием назад " руки" (левой или правой). Благодаря применению блоков пневмоцилиндров 10 каждый схват может совершать вращение относительно оси " руки" о фиксацией в двух крайних положениях -для захвата горизонтально расположенного предмета и для захвата вертикально расположенного предмета. Эти перемещения будем называть поворотом схвата " руки" (девой или правой) в вертикальное или горизонтальное положение.
Таким образом, схема дает полное представление об элементарных движениях, осуществляемых манипулятором. На основании анализа этой схемы может быть составлена кинематическая схема манипулятора ПР " Циклон - 5. Особенностью манипулятора ПР " Циклон - 5" является то, что он может быть оснащен одной или двумя " руками". На рис. 2 представлена кинематическая схема манипулятора с одной рукой.
Звено I совершает относительно стойки поступательное движение (кинематическая пара А). Звено 3 относительно эвена I может вращаться и поступательно перемещаться вдоль вертикали. Это сложное движение обеспечивается кинематическими парами В и С и промежуточным эвеном 2. Схват (точка F) вращается относительно звена 4 (кинематическая пара Б), которое с помощью поступательной пары Д соединено с звеном 3. Аналогично выглядит кинематическая схема манипулятора " Циклон – 5.02" с двумя " руками".
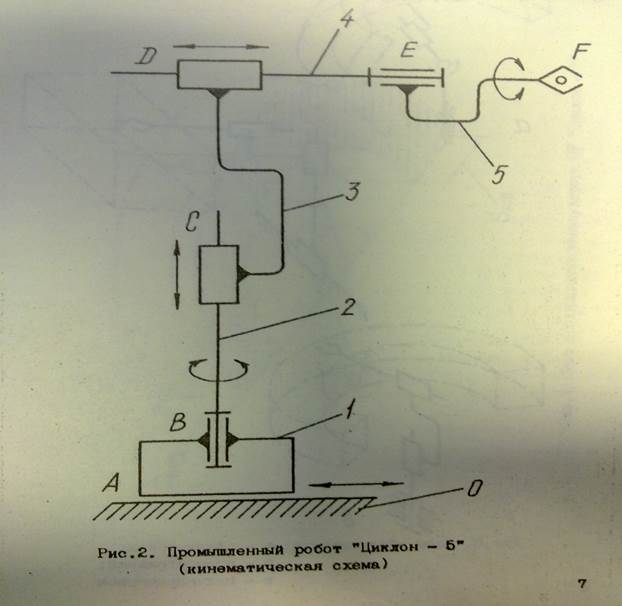
Из рис. 2 видно, что все кинематические пары в схеме: вращательные и поступательные - V -го класса, и число степеней подвижности может быть рассчитано по формуле Чебышева дм плоских механизмов:
W = 3n-2Р5-P4; W=5 или W=7(на две руки).
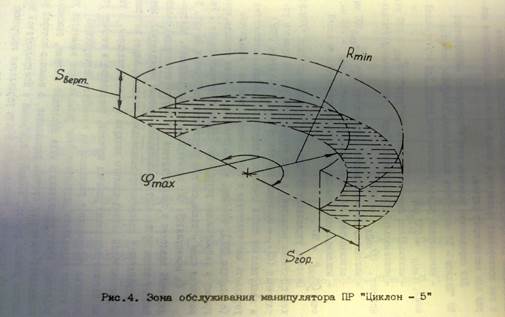
Одной из важнейших характеристик любого манипулятора является зона обслуживания - то пространство, в котором может располагаться рабочий орган схват манипулятора. Наиболее распространенными являются сферическая, цилиндрическая и прямоугольная зоны обслуживания (рис. 3). Вид зоны обслуживания определяется типом, числом и относительным расположением вине» магических пар, входящих в кинематическую схему манипулятора. Очевидно, что для манипулятора ПР " Циклон – 5.02 зона обслуживания (рис. 4) будет иметь цилиндрическую форму (при отсутствие движения сдвига в одной " руке") или будет комбинированной цилиндрическо- прямоугольной (при наличии у манипулятора двух " рук" и движения сдвига).
Зона обслуживания манипулятора характеризуется также объемом и площадь» (площадью проекции на плоскость, параллельно которой совершается движение, например, горизонтальная плоскость для манипулятора ПР " Циклон -5.02"). В каждом конкретном случае площадь и объем зоны обслуживания определяются исходя из действительных размеров звеньев манипулятора я величины их относительных
перемещений.
Знание конкретных размеров зоны обслуживания манипулятора необходимо для предупреждения непреднамеренного попадания в нее посторонних предметов, с целью исключения возможности аварии или несчастного случая.
Для определения величины зоны обслуживания манипулятора ПР " Циклон – 5.02" могут быть использованы следующие величины:
- минимальный радиус расположения схвата (от вертикальной оси), R min = 650 мм;
- максимальный радиус расположения схвата (от вертикальной оси), R max = 1500 мм;
- минимальное линейное перемещение " руки", S гор. = 600 мм;
- максимальный угол поворота " рук" относительно вертикальной оси, ᵠ mах = 180°;
- максимальное вертикальное перемещение " рук" S верт.=100мм.
- максимальная величина линейного сдвига каретки, S cдв. =400 мм;
- максимальный угол поворота схвата относительно своей оси, ᵠ cхв. =180˚.
- погрешность позиционирования- 0, 1мм;
- Объем памяти (число команд управления) = 31;
Диапазон линейных скоростей:
- подьем или опускание руки- 0, 2 м/с;
- выдвижение или вытягивание руки- 11, 5 м/с;
- сдвиг каретки- 0, 5м/с.
Диапазон угловых скоростей:
- поворот вокруг вертикальной оси- 120˚ /сек;
- поворот схвата- 180˚ /сек.
Мощность потребления = 1кВт.
Давление сжатого воздуха = (0, 5-0, 6) МПа.
Масса=780кг.
|
|