Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Асинхронные двигатели. Шаговые и вентильные двигатели
|
|
Асинхронная машина — это электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
Достоинства:
- Лёгкость в изготовлении.
- Отсутствие механического контакта со статической частью машины.
Недостатки:
- Небольшой пусковой момент.
- Значительный пусковой ток.
Асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод (сердечник); все остальные части — конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п.
Обмотка статора представляет собой трёхфазную (в общем случае — многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120 эл.град. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения тока в обмотке статора, поэтому его набирают из пластин электротехнической стали для обеспечения минимальных магнитных потерь. Основным методом сборки магнитопровода в пакет является шихтовка.
По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из пластин электротехнической стали.
Режимы работы:
- Двигательный режим (Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой в обмотке ротора возникает ток. На проводники с током этой обмотки (а точнее, на зубцы сердечника ротора), действуют электромагнитные силы; их суммарное усилие образует электромагнитный вращающий момент, увлекающий ротор вслед за магнитным полем)
- Генераторный режим (Если ротор разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля, то изменится направление ЭДС в обмотке ротора и активной составляющей тока ротора, то есть асинхронная машина перейдёт в генераторный режим)
- Режим холостого хода (Режим холостого хода асинхронного двигателя возникает при отсутствии на валу нагрузки в виде редуктора и рабочего органа.)
- Режим электромагнитного тормоза (противовключение) (Если изменить направление вращения ротора или магнитного поля так, чтобы они вращались в противоположных направлениях, то ЭДС и активная составляющая тока в обмотке ротора будут направлены так же, как в двигательном режиме, и машина будет потреблять из сети активную мощность. Однако электромагнитный момент будет направлен встречно моменту нагрузки, являясь тормозящим.)

Ша́ говый электродви́ гатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток подаваемый в одну из обмоток статора вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
. 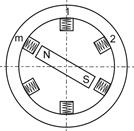
Принцип действия ШД с много фазной обмоткой на статоре и ротором в виде постоянного магнита может быть пояснен рисунком РИСУНОК
Если подать напряжение на 1, 2…m фазу, то ротор повернется так, что его ось совпадет с осями обмоток. При этом ротор имеет m устойчивый состояний, определяемый направлением вектора магнитодвижущей силы(МДС) ротора. Шаги при этом равен 2π /m Если подать напряжение на 2 соседние фазы, то ось ротора расположится посередине между осями фаз. Если на 3-то со средней фазой. Следовательно, если включать поочередно четное и нечетное число фаз, то ротор будет иметь 2m устойчивых положений, а шаг равен p/m. В динамике шаговый двигатель рассматривают как импульсный нелинейный элемент.
В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1, 8°/шаг (200 шагов/оборот) или 0, 9°/шаг (400 шаг/об). Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя. Производители современных шаговых электродвигателей гарантируют точность выставления шага без нагрузки до 5 % от величины шага.
Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз.
Режим дробления шага (микрошаг) реализуется при независимом управлении током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом можно повысить плавность вращения ротора и добиться высокой точности позиционирования. Качество изготовления современных шаговых двигателей позволяет повысить точность позиционирования в 10-20 раз.
Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора.
Достоинства:
§ Широкий диапазон изменения частоты вращения
§ Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
§ Возможность использования во взрывоопасной и агрессивной среде
§ Большая перегрузочная способность по моменту
§ Высокие энергетические показатели (КПД более 90 %)
§ Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
§ Относительно сложная система управления двигателем
§ Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
§ Во многих случаях более рациональным оказывается применение асинхронного двигателя с преобразователем частоты.
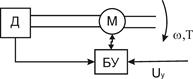
Управляет частотой вращения двигателя блок управления по сигналу от датчика. Синхронный двигатель питается переменным током, а частота вращения или угловая скорость определяются частотой тока в сети. Обмотка статора создает вращающееся магнитное поле и она может быть 2-х или 3-фазной, с однофазной или с пусковой емкостью. Конструкция ротора определяет тип синхронного двигателя: с возбуждением от явнополюсных электромагнитов, от постоянных магнитов, гистерезисный, субсинхронный, реактивный, с катящимся или волновым ротором. Принципиальная схема СД с возбуждением от ПМ. РИСУНОК вращение ротора вызывается взаимодействием поля ротора и вращащегося поля обмотки статора. Если угловые скорости полей и число пар полюсов на роторе и статоре равны, то между разноименными полюсами статора и ротора возникает электромагнитное притяжение, которое вызывает появление электромагнитного момента, называемого синхронным. При запуске угловая скорость ротора не равна синхронной. Синхронный момент близок к нулю. Для увеличения угловой скорости и входа в режим синхронизации при запуске на роботе СД конструируют дополнительную короткозамкнутую обмотку (беличья клетка). Частота вращения двигателя: nдвиг=nполя статора=60f/р, где f-частота тока питания статора, р-число пар полюсов. Частоту вращения двигателя можно изменяя число пар полюсов или частоты вращения поля статора. Обычно используется 2-й способ. Для изменения режима работы и обеспечения реверса в электроприводах с высоким моментом инерции приводного механизма нужно плавно изменять частоту напряжения, питающего СД, чтобы двигатель не выходил из положения синхронизма. Это сложно, особенной когда начальная частота-доли Герц, а затем возрастает до максимального значения. В этом случае используют метод частичного регулирования с самосинхронизацией. Управление преобразователем частоты происходит от системы датчиков положения ротора. Питание вентильных двигателей может быть как от сети постоянного, так и от сети переменного тока. Обычно для питания двигателя от сети постоянного тока используется схема тиристорного преобразователя частоты с инвертором напряжения, если же от сети переменного тока(3-фазного), то применяют схему преобразователя частоты с тиристорным выпрямителем.
|
|