Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Исследование механических характеристик электродвигателя параллельного возбуждения при различных способах параметрического регулирования скорости
|
|
Цель работы
Получить экспериментальные механические характеристики электродвигателя параллельного возбуждения во всех режимах работы и оценить показатели параметрического регулирования скорости.
Теоретические предпосылки
Механической характеристикой электродвигателя называется зависимость n/Mэ/ скорости n и электромагнитного момента Мэ. Момент Мэ отличается от момента Мв на валу двигателя на величину момента потерь холостого хода Мхх= 0, 03 Мн. которым ввиду малости можно пренебречь и считать что Мэ=Мв=М.
Для двигателя параллельного возбуждения момент М пропорционален первой степени тока якоря Iя. Поэтому механическая характеристика может быть представлена зависимостью n/Iя/, которая называется электромеханической или скоростной.
Аналитическое выражение этих характеристик может быть получено из уравнения
|
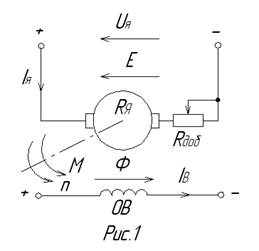
баланса напряжений силовой цепи, которое в соответствии с рис 3 имеет вид:
Uя= Е + IяR= Ke Ф n + Iя R. /9/
Найдя из выражения (9) скорость n после преобразования получим эголитическое выражение для указанных характеристик в виде:
 (10)
(10)
и 

Здесь: R=RЯ+Rдоп – суммарное сопротивление силовой цепи,
КЕ и КМ – постоянные коэффициенты, зависящие от конструктивных данных электродвигателя.
Если UЯ=UЯН , Ф=ФН и R=RЯ, то характеристики называют искусственными.
На рис 4 приведены естественная – I и искусственные механические характеристики для двигательного режима работы: 2 – реостатная, 3 – для работы двигателя при пониженном напряжении на якоре, 4 – для работы двигателя при ослабленном потоке возбуждения.
Диапазон: Д регулирования скорости называется отношение максимальной скорости nмак/которая берется обычно по естественной характеристике при номинальной нагрузке на валу / к ее минимальному значению 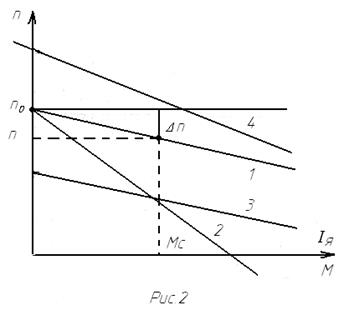 nмин при котором обеспечивается устойчивая работа электропривода / она берется обычно по искусственной характеристике
nмин при котором обеспечивается устойчивая работа электропривода / она берется обычно по искусственной характеристике
 (11)
(11)
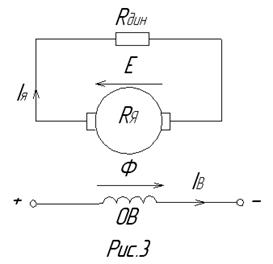
При динамическом торможении якорь двигателя отключается от сети постоянного тока и подключается к динамическому /добавочному/
сопротивлению Rдин , а поток возбуждения остается не именным или усиливается.
Аналитические выражения механических характеристик электродвигателя для режима динамического торможения можно получить из /10/ и /11/. Если получит в них UЯ =0.
Тогда после преобразований, соответственно, получим:
 (12)
(12)
и
 (13)
(13)
Здесь: KI и Км – коэффициенты пропорциональности между скоростью n током IЯ и моментом М.
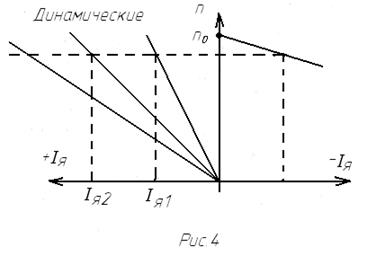 Из (12) и (13) следует, что динамические характеристики представляют собой прямые лини, проходящие через начало координат, а наклон их, при КЕФН= Const, зависит от величины R. Знак минус свидетельствует о том, что ток IЯ протекает по сопротивлению R в обратном направлении. На рис 6 приведены электромеханические характеристик при динамическом торможении для различных значений R.
Из (12) и (13) следует, что динамические характеристики представляют собой прямые лини, проходящие через начало координат, а наклон их, при КЕФН= Const, зависит от величины R. Знак минус свидетельствует о том, что ток IЯ протекает по сопротивлению R в обратном направлении. На рис 6 приведены электромеханические характеристик при динамическом торможении для различных значений R.
Программа работы
1 ознакомиться с электрооборудованием опытной установки, схемой испытания и методикой [3] снятия механических характеристик.
2 снять электромеханические характеристики опытным путем:
а) естественную:
б) реостатную для Rдоб=0, 5RН; получить минимально возможную устойчивую скорость для работы двигателя на реостатной характеристике при номинальной нагрузке на валу. Оценить величину диапазона реостатного регулирования скорости при номинальной нагрузке на валу и при холостом ходе.
в) искусственную для Ф=0, 8ФН /то есть для IВ=0, 8IВН/, определить величину диапазона регулирования скорости изменением потока Ф при номинальной нагрузке на валу двигателя.
г) динамическую для RДИН=0, 5RH.
3 Произвести анализ и сделать обобщающие выводы в отношении влияния параметров на условия пуска, торможения и регулировочные свойства двигателя параллельного возбуждения.
Метод исследования и описание опытной установки
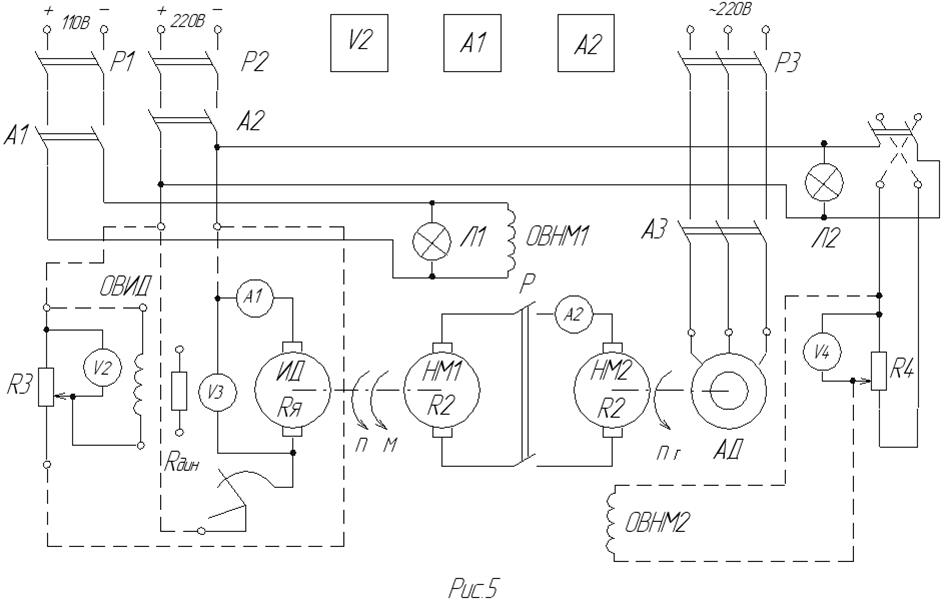
В настоящей работе предусматривается экспериментальный метод исследования механических характеристик с помощью нагрузочных машин согласно методике [3].
Схема опытной установки приведена на рис. 7 где цепи обозначенные сплошными линиями смонтированы, а штриховыми линиями предлагается собрать студентам.
Здесь: ИД- испытуемый электродвигатель постоянного тока независимого возбуждения;
НМI, HM2 – нагрузочные машины постоянного тока независимого возбуждения;
АД – асинхронный электродвигатель (гонник);
A1, A2, A3 – автоматы максимального тока – А -31;
P1, P2, P3 – пакетные выключатели ВП – 25;
П – переключатель на 3 положения ВП – 1 – 131;
R3, R4 – регулировочные реостаты (потенциометры);
RП – пусковой реостат.
Методические указания по снятию механических характеристик
1 Предупреждения.
Запрещается: подавать напряжение на якорь ИД и НМ при отсутствии возбуждения; отключать во время работы схемы обмотки возбуждения ИД и НМ; подавать на НМ сразу полное напряжение; запускать ИД без добавочного пускового сопротивления RП в цепи якоря; превышать скорость агрегата ИД – НМ1 более чем в 1, 3 UН, превышать длительно значение тока электрических машин более чем в 1, 2 IH; включать выключатель Р при согласном направлении Е1 и Е2.
2 Порядок включения опытной установки.
При снятии электромеханических характеристик для двигательного режима работы необходимо соблюдать следующую последовательность операций:
а) привести схему в исходное состояние, при этом необходимо все выключатели поставить в положение 0; пусковой реостат RП должен быть полностью введен; потенциометры R3 и R4 должны находиться, соответственно, в конечном и нулевом положениях; Р – разомкнут.
б) Проверить, при необходимости, поверочным вольтметром V2 наличие напряжения в сети постоянного и переменного тока.
в) Включением выключателя Р2 подать на потенциометр R3 и установкой его движка в соответствующее положение, пользуясь контрольным вольтметром V2 , добиться номинального возбуждения ИД.
г) Поворотом рукоятки реостата RП подключить ИД к сети постоянного тока и, постепенно уменьшая пусковое сопротивление, вывести электродвигатель на естественную характеристику. Поверочным вольтметром V2 убедиться в отсутствии напряжения на якоре НМ.
д) Включением Р1 подать напряжение на обмотку возбуждения НМ, при этом должна загореться сигнальная лампа ЛС1. Поверочным вольтметром V2 убедиться в наличии напряжения на якоре НМ, заметить величину и полярность Е1.
е) Включением Р3 запустить агрегат постоянной скорости АД – НМ2, убедиться в его вращении и поверочным вольтметром проверить отсутствие напряжения на якоре НМ2.
ж) Установкой переключателя П и потенциометра R4 в соответствующее положение, возбудить НМ2 и, пользуясь поверочным вольтметром V2, добиться, перемещением R4, равенства по величине и противоположности по знаку Е2 по отношению к Е1. Рубильник Р разомкнут, поэтому обе машины работают в генераторном режиме.
з) Выключателем Р замкнуть силовую цепь НМ1 – НМ2 и убедиться в отсутствии тока I. После этого приступить к снятию электромеханических характеристик, начиная с рекуперативного режима работы с последующим переходом в двигательный, измеряя для каждого установившегося состояния равновесия скорость n и ток IЯ по амперметру АI. Данные занести в таблицу и построить по ним электромеханические характеристики для случаев, указанных в программе работы.
Для снятия механических характеристик в режиме динамического торможения:
а) Привести опытную установку в исходное состояние, отключить от сети постоянного тока якоря ИД и подключить его к динамическому сопротивлению RДИН.
б) Включением Р1 и Р2 возбудить, соответственно, НМ и ИД (теперь ИД подготовлен для работы генератором) и включением Р замкнуть силовую цепь нагрузочных машин.
в) Запустить агрегат постоянной скорости АД – НМ2, установить в соответствующее положение П и, перемещением движка R4, увеличивать постепенно возбуждение НМ2, напряжение на якоре НМ и ее скорость, а следовательно и скорость ИД.
г) Для каждого установившегося состояния равновесия измерить скорость n и ток якоря IЯ. Данные занести в таблицу и построить по ним динамическую характеристику.
Аналогичным образом снимается кривая момента потерь, только при отключенном ИД. Электромеханическую характеристику ИД для всех случаев, можно было бы получить алгебраическим суммированием снятых зависимостей n/I/ с кривой тока потерь холостого хода I/nXX/ при одной и той же скорости n= Const Однако, в настоящей период в работе лучше изменять непосредственно ток якоря IЯ ИД, а не ток I силовой цепи нагрузочных машин. Поэтому снятие кривой потерь не требуется.
Контрольные вопросы
1 Дать определение снимаемых характеристик, объяснить их конфигурацию и рассказать о показателях параметрического регулирования скорости (диапазоне, плавности, стабильности, направлении регулирования, экономичности и д.р.)
2 Рассказать о последовательности операций при снятии электромеханических характеристик.
3 Оценить режимы работы машин в процессе снятия характеристик.
4 Рассказать о возможных неисправностях в схеме и запрещениях при выполнении работы.
5 Проделать теоретический анализ в отношении влияния параметров U, R, Ф на работу двигателя. Уметь рассчитать снимаемые характеристики.