Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Исследование механических характеристик электродвигателя последовательного возбуждения при различных способах регулирования скорости
|
|
Цель работы
Снять опытные механические характеристик двигателя последовательного возбуждения во всех режимах работы и ознакомиться с его регулировочными и эксплуатационными особенностями.
Теоретические предпосылки
Механической характеристикой ω (Мэ) электродвигателя последовательного возбуждения называется зависимость скорость вращения ω от электромагнитного момента Мэ в установившемся режиме работы.
Электромеханической (или скоростной) характеристикой называется зависимость скорости вращения ω от тока I.
Так как у двигателя последовательного возбуждения Мэ=КI2 то механическая и электромеханическая характеристики представляют собой разные зависимости в осях координат ω, МЭ , I.
Аналитическое выражение электромеханической характеристикой может быть получено из уравнения баланса напряжений силовой цепи (рис. 3), то есть из уравнения электрического равновесия:
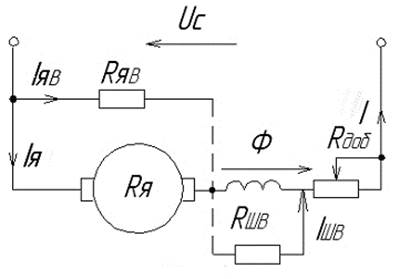 UC=E+IR=KeФω +IR. (9)
UC=E+IR=KeФω +IR. (9)
Найдя отсюда ω после преобразований получим:
 (10)
(10)
По внешнему виду (10) ничем не отличается от аналитического выражения скоростной характеристики двигателя параллельного возбуждения однако
Рис. 3 взаимосвязь между физическими
величинами входящими в него здесь другая.
В этом случае якорь и обмотка возбуждения обтекаются одним силовым током, то есть IЯ= IВ= I.
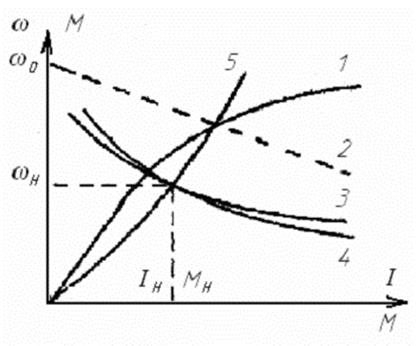
Поток возбуждения является сложной нелинейной функцией тока якоря, взаимосвязь между ними осуществляется кривой намагничивания (рис. 4, кривая 1).
Сопротивление силовой цепи
R=RЯ+RЩ+RДП+RОВ+RДОБ=RЯП+RОВ+RДОБ=RД+RДОБ.
Здесь: RЯ, RЩ, RДП, RОВ и RДОБ – соответственно сопротивление обмотки якоря, контакта щеток, дополнительных полюсов, обмотки возбуждения и добавочное сопротивление.
RЯП и RД – соответственно, последовательное сопротивление якоря цепи и внутреннее сопротивление якоря цепи и внутреннее сопротивление двигателя, задаваемое в каталоге.
Причем RД > RЯП, что снижает жесткость ω (I) при прочих равных условиях по сравнению с двигателем параллельного возбуждения, за счет падения напряжения в обмотке возбуждения (RОВ).
При увеличении нагрузки на валу растет ток I и поток Ф. То есть уменьшение скорости обусловлено как падением напряжения в цепи якоря, так и возрастанием потока. Поэтому с ростом тока нагрузки на валу скорость резко уменьшается и характеристика
ω (I) получается мягкой.
Рис. 4
На рис. 4 для сравнительного анализа приведены характеристики:
2 – электромеханическая для двигателя параллельного возбуждения;
3 – то же для двигателя последовательного возбуждения;
4 – механическая характеристика для двигателя последовательного возбуждения.
На линейной части зависимости Ф(I) можно считать, что поток пропорционален току, т.е.
Ф=КФI, (11)
Где КФ – коэффициент пропорциональности.
Тогда момент может быть представлен в виде:
МЭ=КМФI=KMKФI2 (12)
то есть при одном и том же токе I=Const, двигатель последовательного возбуждения развивает квадратичный момент (рис. 4, кривая 5), обладает небольшим временем пуска, торможения и при прочих равных условиях имеет большую перегрузочную способность по моменту.
С учетом сделанного допущения получим аналитические выражения:
а) для электромеханической характеристики (рис. 4, кривая 3)
 , (13)
, (13)
б) для механической характеристики (рис. 4, кривая 4)
 (14)
(14)
Если UC=UH, R=RД, RШЯ и RШВ= ∞ то характеристики называются естественными. На магнитный поток Ф это не распространяется, так как его величина определяется током I, зависящим от величины нагрузки на валу. Однако, поток можно регулировать применяя специальные схемы решения (шунтирование якоря или обмотки возбуждения).
Если нарушается одно из указанных условий в отношении подводимого напряжения или сопротивления силовой цепи, то характеристики то называется искусственными.
На рис. 5 приведены для сравнительного анализа электромеханические характеристики 1 – естественная; 2 – реостатная; 3 – при работе двигателя на пониженном напряжении; 4 – при шунтировании обмотки якоря; 5 – при шунтировании обмотки возбуждения.
 Из (13), (14) и приведенных зависимостей видны регулировочные свойства двигателя последовательного возбуждения при обычной и целевых схемах соединения, а так же его эксплуатационные особенности в отношении пуска, тормозных режимов и др. В частности, двигатель последовательного возбуждения, при обычной схеме соединения, нельзя пускать без нагрузки, так как при I=0 теоретически ω =∞, то есть двигатель идет
Из (13), (14) и приведенных зависимостей видны регулировочные свойства двигателя последовательного возбуждения при обычной и целевых схемах соединения, а так же его эксплуатационные особенности в отношении пуска, тормозных режимов и др. В частности, двигатель последовательного возбуждения, при обычной схеме соединения, нельзя пускать без нагрузки, так как при I=0 теоретически ω =∞, то есть двигатель идет
«в разнос».
Рис. 5
По этой же причине двигатель последовательного возбуждения не может рекуперировать энергию в сеть, так как для него всегда имеет место неравенство UC< E. Физически это означает, что при I→ 0? то есть Ф→ 0, якорь двигателя вынужден как можно с большей скоростью пересекать магнитные силовые линии убывающего магнитного потока, что бы выработать туже э.д.с. Е, уравновешивающую совместно с IR напряжением сети UC.
При шунтировании якоря эти ограничения отпадают. В этом случае при IЯ=0 всегда существует последовательные ток I=IШЯ, а следовательно создаваемый им поток Ф(IШЯ)≠ 0 и, соответственно, ω 0≠ ∞. При шунтировании якоря ω (IЯ) расположены ниже естественной ввиду увеличения результирующего магнитного потока за счет Ф(IШ) (рис. 5, кривая 4). При шунтировании обмотки возбуждения – выше естественной (рис. 5, кривая 5).
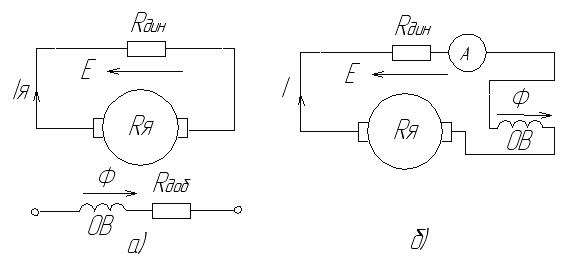
Динамическое торможение осуществляется двумя путями:
а) С независимым возбуждением, которое по существу вопроса ничем не отличается от токового для двигателя независимого возбуждения и в этой работе не рассматривается. Добавочное сопротивление RДОБ вводиться для ограничения тока возбуждения до допустимого значения, обычно номинального(рис. 6, а).
в)
Рис. 6
б) С самовозбуждением. В этом случае силовая цепь электродвигателя отключается от сети и замыкается на динамическое сопротивление. Во избежание размагничивающего действия двигателя обратным током и сохранение знака потока возбуждения, для обеспечения тормозного эффекта, переключают(меняют местами), одновременно, зажимы обмотки возбуждения (рис.6, б).
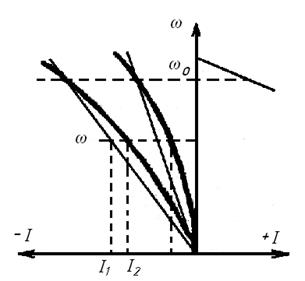
На рис. 6, в. Для сравнительного анализа приведены электромеханические характеристики для динамического торможения: тонкими линиями – для независимого возбуждения; жирными линиями – для самовозбуждения, при различных RДИН
Из сравнения приведенных зависимостей следует, что при одной и той же скорости ω =Const значение тока I1> I2, а, следовательно, М1> М2 то есть, при прочих равных условиях, тормозной эффект при независимом возбуждении лучше, чем при самовозбуждении. Это объясняется тем, что при самовозбуждении Ф зависит от I. Поэтому при замедлении электродвигателя его э.д.с. Е уменьшается как за счет скорости ω, так и за счет потока Ф, резко снижая тормозной ток, момент и эффект, в то время как при независимом возбуждении поток остается постоянным то есть Е= КEω Ф уменьшается только за счет скорости.
Противовключение осуществляется изменением направления тока в якоре (полярности на зажимах якоря) или вращением якоря двигателя против развиваемого им момента, путем механической энергии, подводимой к валу двигателя. Это в настоящей работе не рассматривается.
Программа работы
1 ознакомиться с электрооборудованием опытной установки, схемой испытаний и методикой [3] по снятию механических характеристик.
2 Снять и построить электромеханические характеристики:
а) естественную;
б) реостатную, для RДОБ=0, 5RН
в) искусственную для UC=0.5UH
г) искусственную при шунтировании якоря двигателя;
д) искусственную при шунтировании обмотки возбуждения двигателя.
ж) Определить для всех случаев диапазон регулирования скорости;
е) динамическую с самовозбуждением.
3 Пользуясь зависимостью МЭ(I), рассчитать и построить механические характеристики для случаев «а», «б», «в».
4 Произвести анализ полученных результатов и сделать обобщающие выводы.
Содержание отчета
Студент должен представить индивидуальные отчеты по каждой работе в отдельности и защитить их.
В отчетах должны быть отражены:
1 Титульный лист с указанием наименования работы, кафедры, института, фамилии, имя и отчества студента и академической группы, а также дата выполнения и личная подпись.
2 Цель работы и перечень вопросов, подлежащих исследованию.
3 Электрическая схема опытной установки. Таблицы экспериментальных данных и снятые характеристики.
4 Выводы.
Метод исследования и описание опытной установки
В настоящей работе предусматривается экспериментальный метод исследования с помощью нагрузочных машин согласно методике [3].
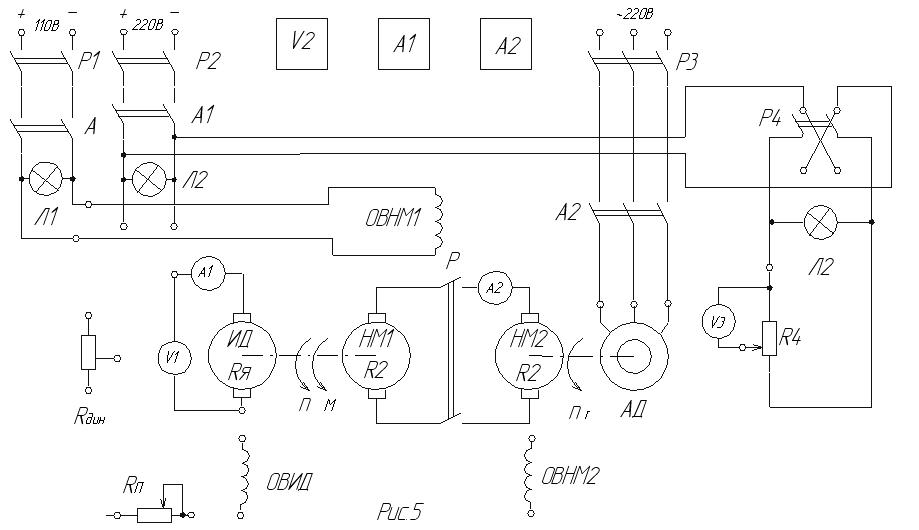
Схема опытной установки приведена на рис. 7
Здесь:
Цепи обозначенные сплошными линиями собраны; штриховыми линиями предлагается собрать студентам;
ИД – испытуемый электродвигатель постоянного тока, последовательного возбуждения;
НМ1 и НМ2 – нагрузочные машины постоянного тока независимого возбуждения;
АД – Асинхронный электродвигатель – гонник;
RI – Регулировочный реостат (потенциометр)
RП – пусковой реостат;
RДИН – динамическое сопротивление;
Р1, Р2, Р3 – пакетные выключатели ВП – 25;
Р4 – переключатель на три положения ВП – I – I3I;
А1, А2 – Автоматы максимального тока А – 31;
ЛС1, ЛС2, ЛС3 – лампы сигнальные.
Методические характеристики по снятию механических
характеристик
1 Предупреждения.
Запрещается: подавать напряжение на НМ при отсутствии возбуждения; подавать сразу полное напряжение на НМ; отключать во время работы схему обмотку возбуждения НМI; запускать ИД без пускового сопротивления в силовой цепи RП; запускать ИД без нагрузки; превышать скорость ИД выше 1, 3 nH; прерывать длительное значение тока IЯ и I более чем на 1, 3 IH: включать рубильник Р при согласном направлении Е1 и Е2. Выверку равенства э.д.с. Е1 и Е2 производить при введенном RДОБ, то есть при работе ИД на реостатной характеристике.
2 Порядок включения опытной установки.
При выполнении работы рекомендуется следующая последовательность операций:
а) Привести опытную установку в исходное состояние. При этом все выключатели должны находиться в выключенном положении (положение 0); пусковой реостат RП должен быть введен; потенциометр R1 должен находиться в нулевом положении, так что бы напряжение на ОВНМ2 отсутствовало; выключатель Р – разомкнут.
б) Проверить, при необходимости, поверочным вольтметром V2 наличие напряжения в сети.
в) Собрать схему. Включением выключателя Р2 запустить ИД для работы не реостатом характеристике; включением выключателя Р1 возбудить НМ1, при этом должна загореться сигнальная лампа ЛС1; поверочным вольтметром V2 убедиться в наличии напряжения на якоре НМI, заметить его величину и полярность.
г) Включением выключателя Р3 запустить агрегат постоянной скорости НМ2-ИД, убедиться в его вращении; установкой Р и потенциометра R1 в соответствующее положение возбудить НМ2 и пользуясь вольтметром V2 перемещая движок R1, выверить напряжение на нагрузочных машинах Е1 и Е2. Они должны быть равны по величине и противоположны по знаку. В этом случае, при одноименных зажимах, стрелка V2 должна отклониться в ту же сторону.
д) Включением Р замкнуть силовую цепь НМ1 – НМ2 и убедиться в отсутствии тока I в этой цепи, после чего можно приступить к снятию характеристик ω (IЯ), для двигательного режима работы. Так как в этом случае иметься возможность измерять непосредственно ток якоря, то снятие кривой момента потерь, в соответствии с методикой [3] теряет смысл. Снять ω (IЯ) для пунктов а, б, в, г, д программы.
Для снятия ω (IЯ) в режиме динамического торможения с самовозбуждением необходимо:
а) Привести опытную установку в исходное состояние (выключить все выключатели, в определенной последовательности, с учетом пункта 1 (запрещение)). Отсоединить силовую цепь двигателя от сети питания, подключить ее к динамическому сопротивлению RДИН и переключить концы обмотки возбуждения испытуемого двигателя ИД.
б) Включением Р1 Возбудить нагрузочную машину НМ и замыканием рубильника Р подготовить силовую цепь нагрузочных машин к пуску НМ1.
в) Запустить агрегат постоянной скорости АД – НМ2, включить Р4 и постепенным перемещением движка R1 регулировать скорость НМ1, а, следовательно, и ИД, спаренного с ней. Для каждого установившегося состояния равновесия необходимо измерить ток IЯ и скорость ω. Экспериментальные данные занести в таблицу и затем построить по ним искомые характеристики.
Контрольные вопросы
1. Дать определение механической и электродинамической характеристики, объяснить их разницу.
2. Объяснить конфигурацию механических характеристик для всех случаев и сформулировать отличительные эксплуатационные и регулировочные особенности двигателя последовательного возбуждения. Оценить показатели регулирования скорости.
3. Рассказать о значении элементов и работе схемы опытной установки, последовательности операций при включении схемы в работу и снятии характеристик. Объяснить методику снятия характеристик с помощью нагрузочных машин. Проделать анализ режимов работы для всех электрических машин, используемых при снятии характеристик.
4. Оценить возможные неисправности в схеме и заострить внимание на техники безопасности.
Литература
1. М.Г. Чиликин. Общий курс электропривода. Энергия, Москва, 1971г.
2. М.Г. Чиликин, М.М. Соколов, З.М. Терехов, А.В. Шинянский. Основы автоматизированного электропривода. Энергия, Москва, 1974г.
3. МВ и ССО РСФСР. Ульяновский политехнический институт. Кафедра «Электропривод и автоматизация промышленных установок». Методические указания по снятию механических характеристик экспериментальным путем с помощью нагрузочных машин.
|
|