Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Регулирование скорости вращения с помощью тиристорного преобразователя напряжения
|
|
Одним из возможных способов изменения скорости и момента асинхронного электродвигателя является изменение напряжения на выводах его статора, при этом частота такого напряжения постоянна и равна частоте сети переменного тока. На рис. 1.8 приведена схема электропривода при реализации этого способа. Между выводами питающей сети и статора асинхронного электродвигателя включен преобразователь напряжения, при использовании которого может изменяться напряжение, подводимое к статору электродвигателя.
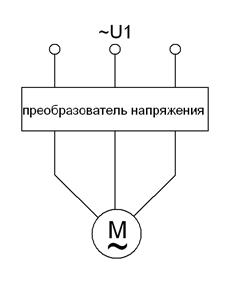
Рис. 1.8. Структурная схема регулирования координат электропривода изменением напряжения
На рис. 1.2, г приведены механические характеристики электродвигателя при регулировании напряжения на выводах его статора. Как видно из этих графиков, получаемые искусственные характеристики оказываются малопригодными для целей регулирования скорости, так как по мере уменьшения напряжения резко снижаются критический момент двигателя и его перегрузочная способность, а диапазон регулирования скорости очень мал. Поэтому схема, показанная на рис. 1.8, используется лишь для регулирования момента асинхронного электродвигателя и его тока.
Для регулирования напряжения на выводах статора асинхронного двигателя могут использоваться различные устройства — автотрансформаторы, магнитные усилители и тиристорные преобразователи напряжения (ТПН). Определяется это рядом достоинств ТПН: высоким КПД, простотой в обслуживании, легкостью автоматизации работы электропривода.
На рис. 1.10 приведена практическая схема управления асинхронным электродвигателем с помощью ТПН, состоящего из трех пар встречно-параллельно соединенных тиристоров, каждая из которых включена между фазой сети и фазой статора асинхронного двигателя. Регулирование напряжения на АД в этой схеме осуществляется изменением угла управления α, т. е. сдвигом во времени управляющих импульсов, подаваемых на управляющие электроды тиристоров.
Если на тиристоры VS1 и VS2 не подаются импульсы управления, то они закрыты и напряжение на нагрузке UH равно нулю. При подаче на тиристоры импульсов управления в момент их естественного открытия (угол управления α = 0) они будут полностью открыты и к нагрузке будет приложено все напряжение сети). Если осуществлять подачу импульсов управления на тиристоры с некоторой задержкой относительно момента естественного открытия (угол управления α ≠ 0), то к нагрузке будет прикладываться часть напряжения сети. Изменяя угол управления α от нуля до л, можно регулировать напряжение на нагрузке от полного напряжения сети до нуля. Управляющие импульсы подаются на все тиристоры не одновременно, а со сдвигом во времени на третью часть периода частоты сети. Это определяется тем, что управляющий импульс каждого тиристора должен быть сдвинут относительно напряжения той фазы сети, к которой подключен тиристор, на один и тот же угол управления a, a фазные напряжения сети сдвинуты относительно друг друга на 120°.
На рис. 1.11 приведены механические характеристики асинхронного электродвигателя с ТПН при изменении управляющего угла α от 0 до π. Из графиков следует, что с увеличением угла правления α снижается критический момент асинхронного двигателя и падает жесткость его механических характеристик. Вследствие этого при возможных колебаниях момента сопротивления механизма скорость его движения может резко измениться, что в большинстве случаев недопустимо.
Под воздействием управляющих импульсов к нагрузке прикладывается несинусоидальное напряжение. При этом возникающие на выходе ТПН высшие гармоники напряжения оказывают определенное влияние на работу двигателя. В частности, каждая гармоника напряжения определяет прохождение дополнительного тока в обмотках двигателя, который вызывает соответствующие дополнительные потери в обмотках. Практика показывает, что при питании асинхронного электродвигателя от ТПН по схеме рис. 1.10 потери на 10—20 % больше, чем при питании асинхронного электродвигателя от источника, изменяющегося синусоидального напряжения. Вместе с тем следует отметить, что высшие гармоники напряжения оказывают незначительное влияние на момент АД.
|
|